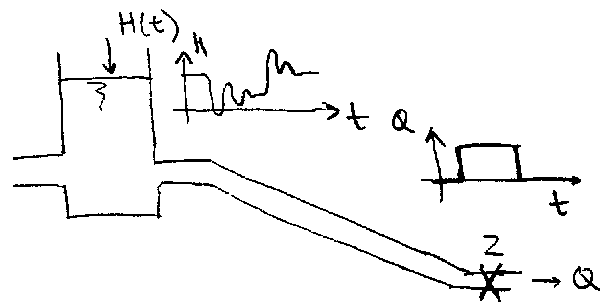
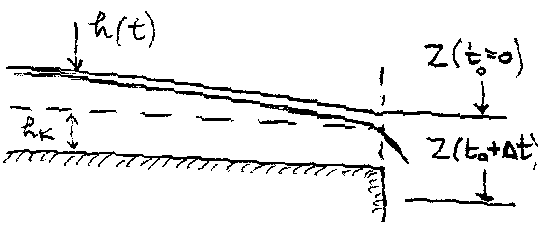
Predpostavimo da na jednom slozenom hidrotehnickom objektu vodostan-cevovod-zatvarac, treba meriti nivoe u vodostanu pri naglom otvaranju/zatvaranju zatvaraca (slika 4.1).
Figure 4.1: Rezervoar sa cevovodom je slozeni dinamicki sistem
Da bi se korektno obavila merenja na sistemu sa slike 4.1 potrebno je poznavati osnovne dinamicke pokazatelje, kao na primer:
kolike su maksimalne amplitude oscilacija u vodostanu,
koliko je kasnjenje u odnosu na manevar na zatvaracu,
koja je perioda (brzina) oscilacija nivoa?
i na osnovu tih pokazatelja izabrati odgovaraju\'cu mernu opremu i sistem za prikupljanje podataka.
Kao sto sistem vodostan-cev ima odredjene dinamicke karakteristike, tako i sami senzori koje koristimo imaju svoje karakteristike. Ako nivo vode koji se menja u vremenu merimo pomo\'cu plovka sa enkoderom (ili potenciometrom), da li \'ce plovak verno pratiti oscilacije nivoa?
Figure 4.2: Sam merni uredjaj za nivo u rezervoaru je dinamicki sistem za sebe: izlazni signal ne prati verno brze promene u nivou vode
Odgovor: Za naglu promenu nivoa vode, kao sto je to prikazano na gornjem dijagramu slike 4.2, izlazni signal sa mernog sistema \'ce imati oblik slican donjem dijagramu - signal \'ce sa zakasnjenjem i postepeno da pada, a velika je sansa da zaosciluje oko konacne vrednosti.
Pitanje: Pa kako onda da izmerimo stvarnu, originalnu promenu nivoa vode? Ili, da li \'ce se pomo\'cu izabranog mernog sistema dobiti korektni merni rezultati?
Odgovor: da bi korektno sproveli merenja, treba poznavati dinamicke karakteristike i sistema i opreme kao i njihovo medjusobno sadejstvo.
Moze se dati slede\'ca definicija: Dinamicka analiza se svodi na vremensku analizu veze izmedju ulaza u sistem i izlaza iz sistema (velicine koju merimo).
Znaci, treba izuciti dinamicke karakteristike sistema, onoga sto merimo i onoga pomo\'cu cega merimo. Znaju\'ci te karakteristike, mogu\'ce je obaviti inverznu analizu: na osnovu snimljenog izlaznog signala, izracunati kako je izgledala originalna vremenska serija.
U nasim razmatranjima, bavi\'cemo se samo idealnim sistemima, koji su:
linearni - imaju osobinu aditivnosti f(x1+x2) = f(x1) + f(x2) i osobinu homogenosti f(cx1)=cf(x1)
sa konstantnim parametrima - sve fundamentalne osobine ne zavise od vremena (na primer: hrapavost cevi od vodostana do zatvaraca, ili tezina plovka u nivometru).
U stvarnosti, fizicki sistemi se cesto samo u jednoj oblasti radnih parametara ponasaju linearno, dok se izvan te oblasti ponasaju nelinearno, pa cak dolazi i do plasticnih deformacija i loma.
Vazna osobina: Linearni sistemi sa konstantnim parametrima ne mogu da promene pobudne frekvencije ve\'c samo da ih oslabe i/ili fazno pomere.
(Za budu\'cu knjigu: Nelinearni sistemi, kako reaguju na ulaz, f1+f2 kada se dobija spektar raznih frekvencija - videti kod Simi\'ca - beleske sa poslediplomske nastave)
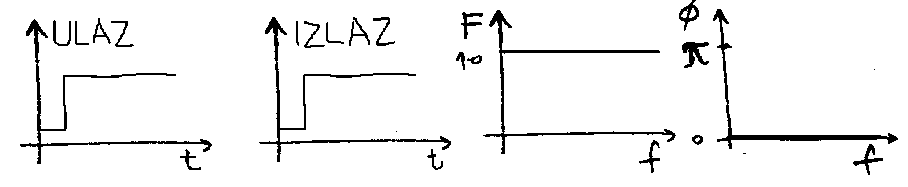
Posmatra se neki slozen sistem, koji ulaznu funkciju φ(t) transformise u izlaz Ψ(t) (ulaz izaziva reakciju sistema), pri cemu izlaz kasni za ulazom, za vremenski interval τ (slika 4.3).
Figure 4.3: Ulaz i izlaz iz slozenog sistema
Definicija: Tezinska funkcija h(τ) predstavlja izlaz iz sistema u bilo kom vremenskom trenutku za jedinicni ulaz, koji se desio ranije, za vreme τ. Izlaz iz sistema za bilo koji ulazni signal, je tada konvolucija tezinske (ili transfer) funkcije i tog ulaznog signala:
Ψ(t) =
⌠ ⌡
∞
−∞
h (τ) φ(t−τ) d τ
(U knjizi The Scientists and Engineer's Guide to Digital Signal Processing - Steven Smith - se moze na\'ci lep opis konvolucije poglavlja 6 i 7 (link ne radi na Internet prezentaciji) sa primerima raznih filtera i uporedjenjem sa korelacijom)
U datom primeru je h(τ) = 0 za τ ≤ 0 .
Vazno: Tezinska funkcija h(τ) nosi vremenske informacije o odzivu sistema na jedinicnu pobudu.
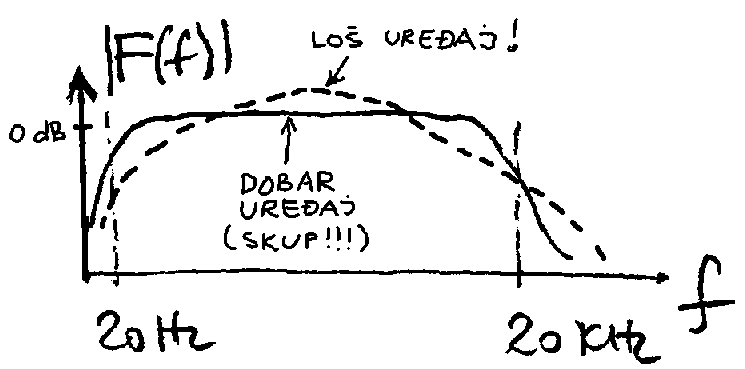
Idealan sistem treba da preslika ulaz u izlaz tako da sacuva kompletan frekventni sadrzaj ulaznog signala, odnosno, treba da pojacava ili gusi sve frekvencije iz ulaznog signala na isti nacin. Kod idealnog sistema funkcija frekventnog odziva bi bila prava linija paralelna sa ordinatom f.
Primer funkcije frekventnog odziva: Kada se kupuje kvalitetan audio uredjaj, telefon, pojacalo, zvucnici, ..., prvi kriterijum je da sistem verno reprodukuje zvuk. Drugim recima, postavlja se uslov da sistem ima linearnu frekventnu karakteristiku u celom cujnom opsegu, od 20 Hz do 20 KHz, slika 4.4.
Figure 4.4: Tipicna kriva frekventnog odziva za Hi-Fi audio uredjaje
Izmedju tezinske funkcije i funkcije frekventnog odziva postoji direktna veza:
Tezinska funkcija h(τ) daje vremenski odziv sistema na jedinicnu pobudu. Da bi se dobile frekventne informacije, treba uraditi Furijeovu transformaciju tezinske funkcije h(τ):
F ( f ) =
⌠ ⌡
∞
0
h ( τ) e−i2πf τd τ
gde je F ( f ) kompleksna funkcija. Funkcija frekventnog odziva se moze predstaviti i u obliku magnitude |F ( f )| (faktora pojacanja) i faznog ugla Φ( f ) (kasnjenja):
F ( f ) = | F ( f ) | e−i Φ( f )
Vazna osobina funkcije frekventnog odziva se vidi iz izraza koji povezuje tezinsku funkciju, ulaz u sistem i izlaz (u vremenskom domenu):
Ψ( t ) =
⌠ ⌡
∞
−∞
h (τ) φ(t−τ) d τ
Ako se napravi Furijeova transformacija obe strane izraza, dobija se:
Y(f) = F(f) X(f)
gde su Y(f) frekventni spektar izlaznog signala, F(f) funkcija frekventnog odziva a X(f) frekventni spektar ulaznog signala. Dobijeni izraz pokazuje da se moze predvideti frekventni sadrzaj izlaza ako se zna odziv sistema F(f). Zbog ovoga se cesto funkcija frekventnog odziva naziva i transfer funkcija sistema.
Posto se radi iskljucivo sa linearnim sistemima, mogu\'ce je predvideti i izlaz iz drugog sistema koji je u nastavku prvog:
Z ( f ) = F1 ( f ) F2 ( f ) X ( f )
Na primer, ako se meri nivo vode u vodostanu, tada je Z(f) spektar izmerenog nivoa na vodostanu, F1(f) je frekventna karakteristika vodostan-spojna cev, F2(f) frekventna karakteristika koris\'cenog nivometra, a X(f) spektar promene nivoa koji se meri u vodostanu.
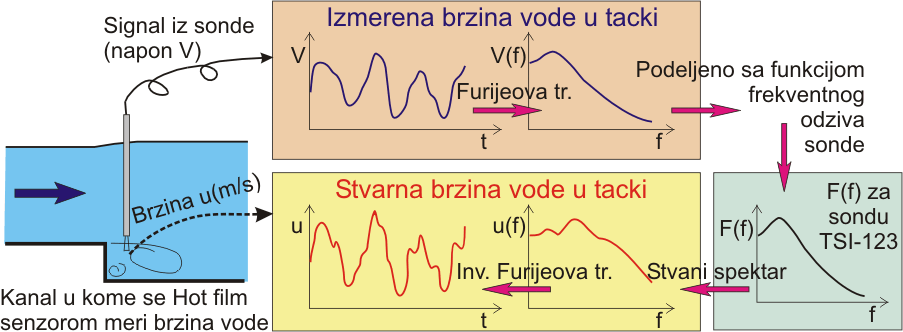
VAZNO: Dobijeni izrazi dozvoljavaju da se odredi kakav je bio originalni spektar neke izmerene velicine kada se poznaju samo konkretni rezultati merenja, odnosno njihov spektar Y(f). Na primer, ako se mere fluktuacije brzina u sondom za koju je ranije utvrdjena funkcija frekventnog odziva F(f), stvarni spektar fluktuacija brzina je:
X(f) =
Y(f)
F(f)
Figure 4.5: Merenje fluktuacija brzine iza stepenika Hot-Film sondom: kako se od izmerenog rezultata dobija originalna vremenska serija
U analizi funkcije frekventnog odziva nekog sistema, cesto se koristi jedinicna Dirac-ova funkcija kao ulazna velicina. Razlog se vidi na slici 4.6 gde je prikazana Furijeova transformacija jedinicne, Dirac-ove funkcije: spektar takve ulazne velicine je konstantan. Isti frekventni izlaz ima i takozvani "beli sum", potpuno nekorelisan i slucajan signal. Sum radio aparata kada nije na stanici je beli sum, pa se takav sum cesto koristi u analizi odziva audio uredjaja.
Figure 4.6: Autokorelacija i Furijeova transformacija jedinicne Dirac-ove δ funkcije i "belog" suma
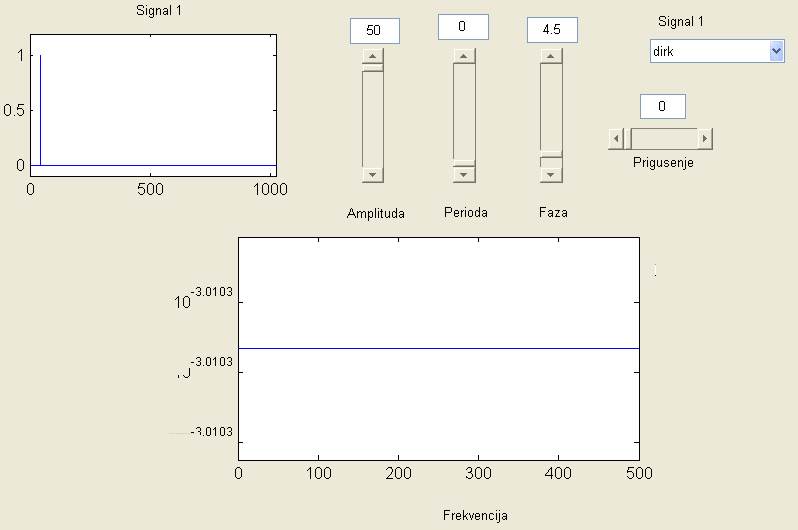
Slican rezultat se dobija primenom MatLab programa FURIJE (mozete preuzeti sa sajta ZIP file RazniSignali.zip - raspakujte .M i .FIG fileove u isti direktorijum)
Figure 4.7: Furijeova transformacija jedinicne Dirac-ove δ funkcije (program Furije.m)
U praksi se funkcija frekventnog odziva cesto odredjuje kao odnos Furijeovih transformacija izlaza i ulaza:
F ( f ) =
Y ( f )
X ( f )
a koristi se jedinica [dB] (dB = 10 log[(a)/(b)] , a- ulazna amplituda, a b-izlazna amplituda signala), pri cemu se kao ulaz zadaje jedinicna Dirac-ova δ funkcija u vremenskom domenu (slika 4.6) ili "beli sum".
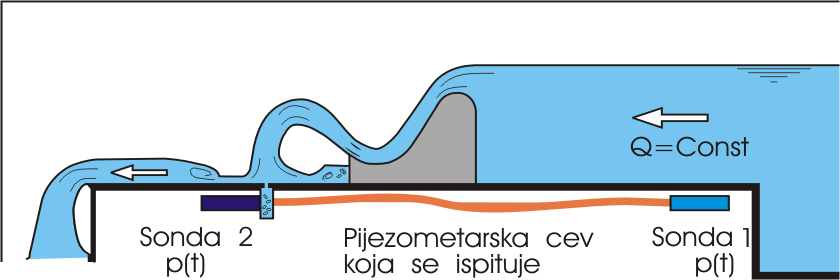
Studentska vezba - transfer funkcija pijezometra na osnovu merenja fluktuacija pritiska u slapistu. (4.25)
U prethodnom poglavlju je pokazano da slozeni sistemi po pravilu modifikuju svoje ulazne velicine tako da im promene pored amplituda i frekventni sadrzaj. Uvedeni su pojmovi:
tezinske funkcije (u vremenskom domenu)
funkcije frekventnog odziva ili transfer funkcije (u frekventnom domenu)
kao mere tih promena. U nastavku \'ce se analizirati zasto do tih promena dolazi, postavljaju\'ci osnovne jednacine mehanike za slozeni mehanicki sistem.
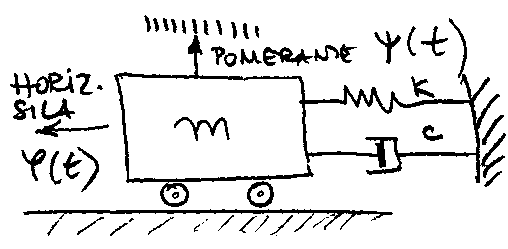
Analizira se ponasanje sistema koji se sastoji od:
Opruge Fk = −k ψ( t )
Viskoznog trenja Fc = −c [(∂ψ)/(∂t)]
Mase - inercijalna sila Fm = −m [(∂ψ2)/(∂t2)]
Figure 4.8: Mehanicki sistem koji se sastoji od mase, opruge i viskoznog trenja
Iz ravnoteze horizontalnih sila se dobija:
m
∂ψ2
∂t2
+ c
∂ψ
∂t
+ k ψ = φ
(4.1)
Posto je φ(t) ulaz u sistem, a ψ(t) izlaz, moze se napisati relacija:
Y ( f ) = F ( f ) X ( f )
gde je Y (f) Furijeova transformacija izlaza ψ(t), F (f) funkcija frekventnog odziva ili transfer funkcija sistema i X (f) Furijeova transformacija ulaza φ(t).
Za jedinicni ulaz (φt0=0=1,φt0 + ∆t=0) spektar ulaza je konstantan:
X (f) = const. = 1
pa je izlaz iz sistema jednak transfer funkciji sistema F(f):
Y ( f ) = F ( f ) =
⌠ ⌡
∞
0
ψ( t ) exp−i2πftdt
Ako se Furijeova transformacija primeni na jednacinu ravnoteze horizontalnih sila, uz zamenu prvog i drugog izvoda izlazne velicine ψ:
d ψ( t )
dt
= i2πfF ( t )
d2 ψ( t )
dt2
= − ( 2πf )2F ( f )
dobija se izraz:
[ − ( 2πf )2m + i2πfc +k ] F ( f ) = 1
pa je funkcija frekventnog odziva:
F ( f ) =
1
k− ( 2πf )2m +i2πfc
Ako se uvedu zamene: ξ = faktor prigusenja = [(c)/(2√{km})] i fn = sopstvena neprigusena frekvencija = [1/(2π)] √{[(k)/(m)]} dobija se funkcija frekventnog odziva u kompleksnoj formi:
F ( f ) =
1
k
1−
⎛ ⎝
f
fn
⎞ ⎠
2
+ i2ξ
f
fn
(4.2)
ili, sredjeno u formi magnitude | F ( f )| i faznog ugla Φ(f)1:
F ( f ) = | F ( f )| e−iΦ( t )
| F ( f )| =
1
k
√
[ 1− ( [(f)/(fn)] )2 ]2 + [ 2ξ[(f)/(fn)] ]2
Φ( t ) = arctan
⎡ ⎢ ⎢
⎢ ⎣
2ξ
f
fn
1−
⎛ ⎝
f
fn
⎞ ⎠
2
⎤ ⎥ ⎥
⎥ ⎦
Ponasanje slozenog mehanickog sistema pri jedinicnom ulazu, u formi vremenskog dijagrama je prikazano na slici 4.2 i 4.3. Na slede\'coj slici je data transfer funkcija mehanickog sistema (Furijeova transformacija tezinske funkcije):
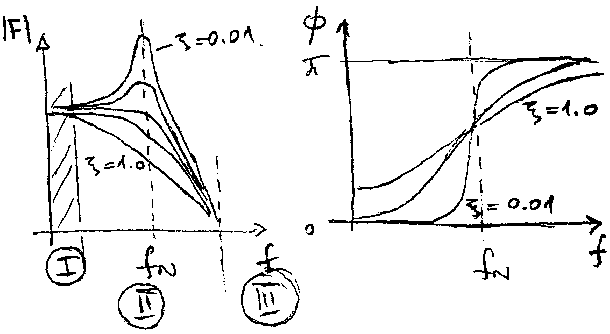
Figure 4.9: Magnituda i fazni ugao frekventnog odziva mehanickog sistema
Figure 4.10: Signal u vremenskom domenu ciji spektar je prikazan na prethodnoj slici
Uvodjenjem faktora prigusenja ξ i sopstvene frekvencije fn, moze se analizirati ponasanje sistema za razlicite opsege njihovih vrednosti. Na dijagramu transfer funkcije se uocavaju slede\'ce oblasti (slika 4.9):
u oblasti I (relativno spore promene) sistem je neutralan, verno prenosi ulazne velicine
pojacavati ili prigusivati sopstvenu frekvenciju (oblast II),
u oblasti III (brze promene) ne prenosi ulaz (veliko prigusenje ulaznih velicina).
Interesantno je pogledati kratku demonstraciju uticaja pobudne frekvencije na sistem sa masom i oprugom (slabo prigusenje): KLIKNI za film SpringMassResponse.wmv (Film snimio David G. Alciatore, spring-mass response. Na sajtu film ne radi, morate potraziti na Internetu ...)
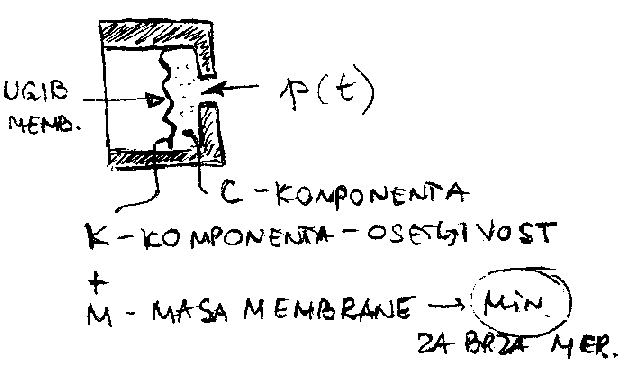
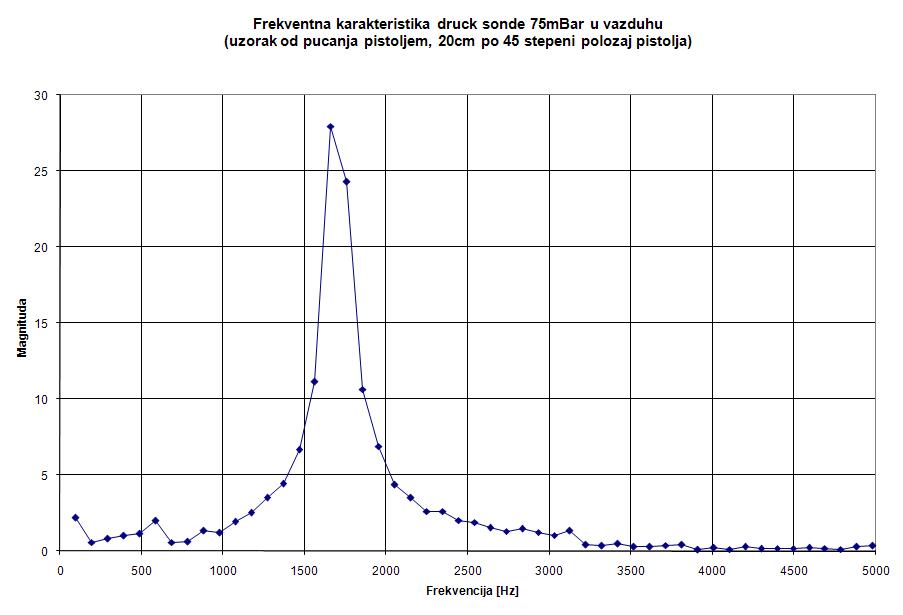
Primer frekventne krive senzora koji se ponasa kao sistem drugog reda: na slici 4.11 prikazano je merenje pritiska, gde je sam senzor sistem drugog reda, sa c, k i m komponentom.
Figure 4.11: Merenje pritisaka pomocu pretvaraca sa membranom
Da bi se ispitala frekventna karakteristika, na membranu se dovodi jedinicna Dirakova pubuda: moze pustaju\'ci celicnu kuglicu da padne na membranu i odskoci od nje, ili, na primer, izazivaju\'ci kratak udarni talas, poput pucanja iz pistolja...
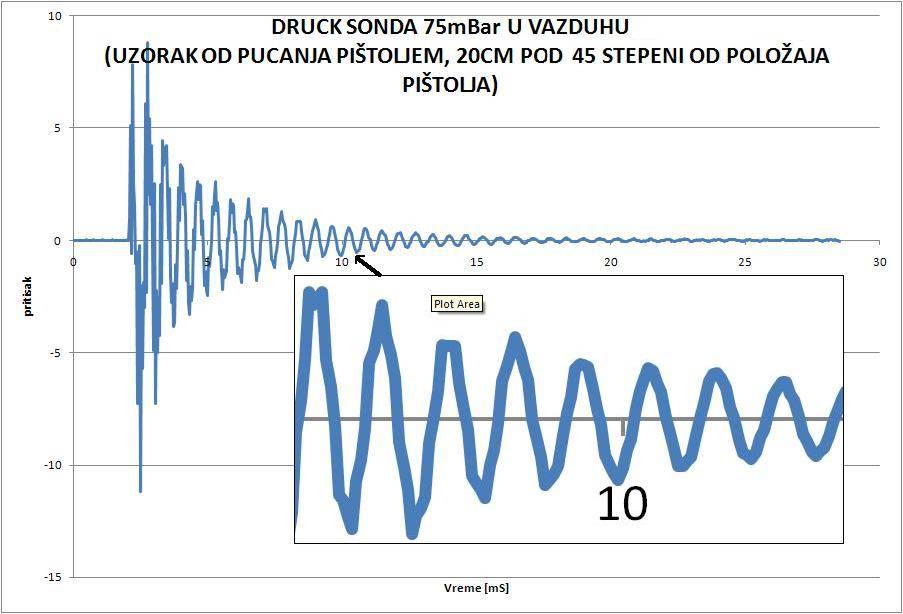
Figure 4.12: Signal sa sonde za pritisak, za naglu promenu pritiska (skoro jedinicnu pobudu)
Figure 4.13: Frekventni domen signala sa sonde za pritisak, za naglu promenu pritiska
Izlozeni primer mehanickog sistema u prethodnom poglavlju, dat jednacinom 4.1 je primer sistema drugog reda zbog clana m [(∂2 ψ)/(∂t)] koji unosi inerciju.
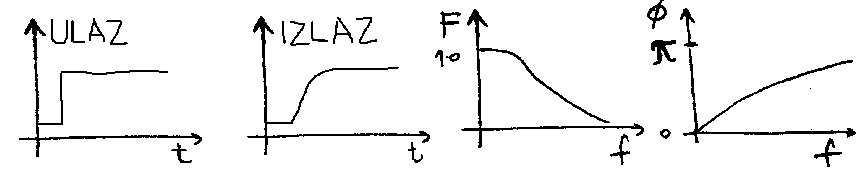
Sistemi prvog reda imaju samo clanove k i c (na primer termometar):
c
∂ψ
∂t
+ k ψ = φ
(4.3)
Figure 4.14: Izlaz usled jedinicnog ulaza, magnituda i fazni ugao frekventnog odziva mehanickog sistema prvog reda
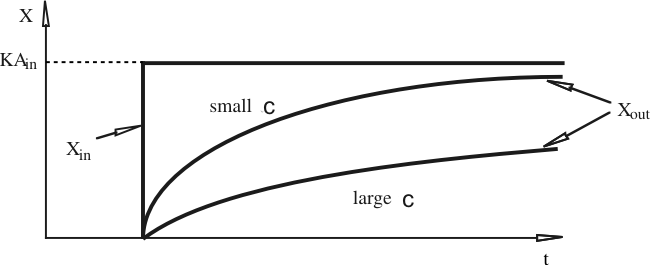
Figure 4.15: Frekventni odziv sistema prvog reda u zavisnosti od viskoznog clana c
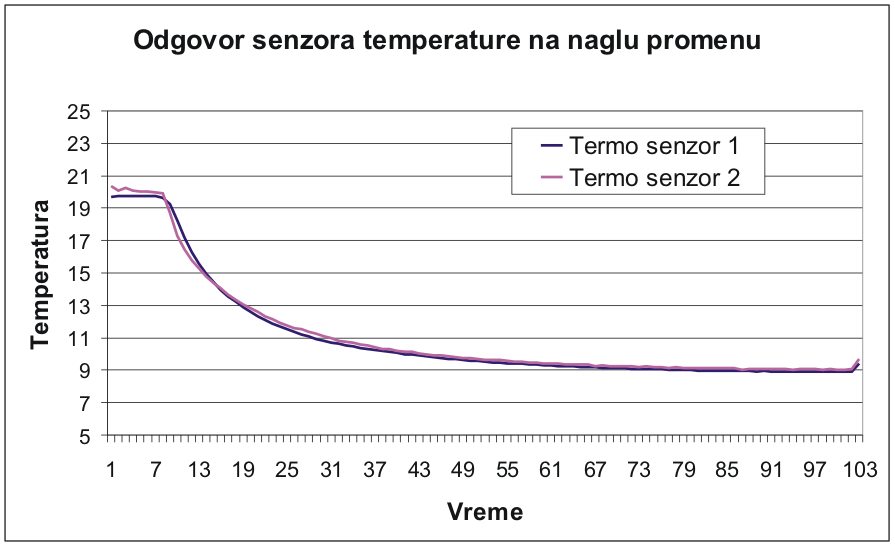
Figure 4.16: Provera dinamickog odziva dva termometra na naglo smanjenje temperature
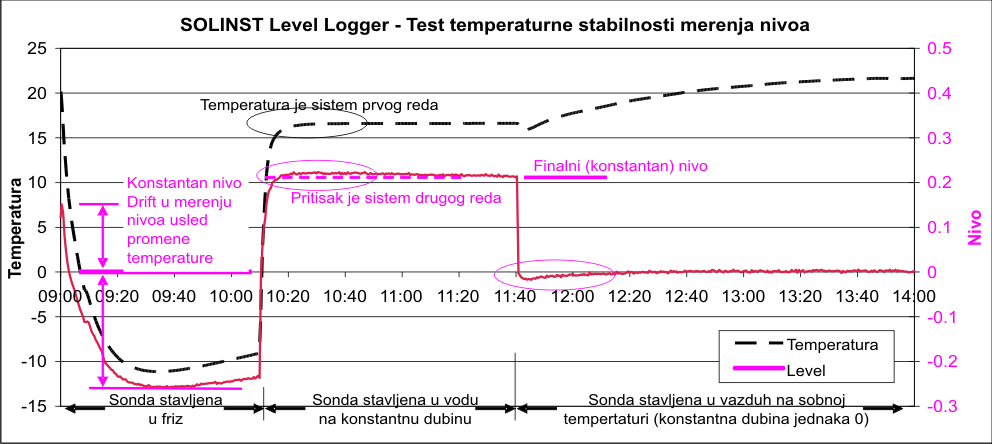
Evo jos jednog primera - Loger nivoa i temperature, firme SOLINST , koji je zgodan da se koristi za merenja u bunarima i pijezometrima. Na slede\'coj slici je prikazan rezultat testa u kome je sonda sa sobne temperature, prvo stavljena u friz, a zatim izvadjena i potopljena u vodu, na konstantnu dubinu. Nakon nekog vremena, izvadjena je iz vode i ostavljena na sobnoj temperaturi.
Figure 4.17: Dinamicki odziv termometra u SOLINST logeru
Kako utice promena temperature na pokazivanje nivoa? Prema proizvodjackim specifikacijama, trebalo bi da razlika u pokazivanju nivoa bude manja od 5 mm za promene od -10 do +400C. Medjutim, promene su mnogo ve\'ce!
Sistem za merenje nivoa (pritiska) u logeru je drugog reda - vidi se po tome sto postoji "prebacivanje" pokazivanja po nagloj promeni. Sistem za merenje temperature je prvog reda.
Figure 4.18: Temperaturna stabilnost merenja nivoa u SOLINST logeru
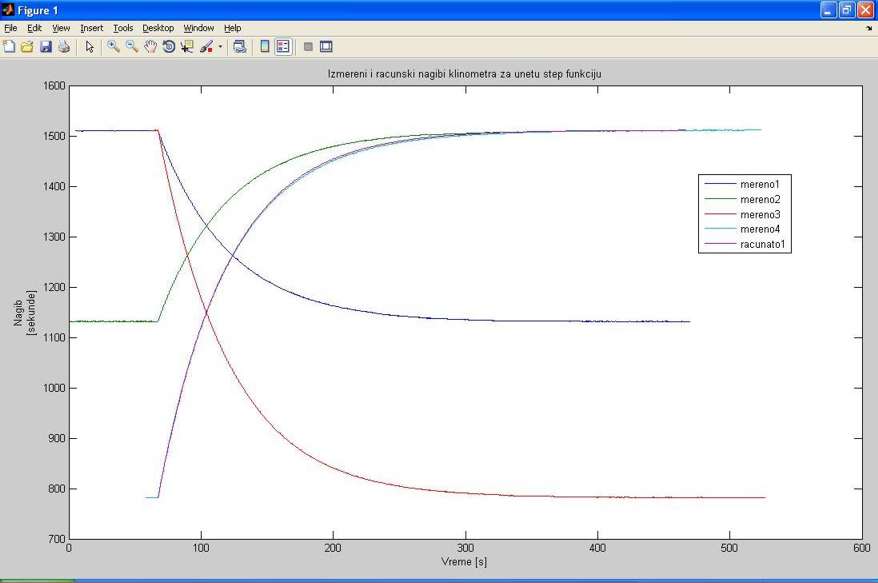
Cesto se merni senzori koji su u svom principu sistem drugog reda, toliko puno priguse konstrukcijom, da postanu sistem prvog reda. Primer je senzor za merenje nagiba - klinometar. U njemu se nalazi masa kojoj se meri sila oslanjanja na dve tacke (ili tri) - odstupanje od horizontalnog polozaja daje ve\'cu silu sa jedne strane mase a manju sa druge. Ako se masa stavi u gust, viskozan fluid, sistem postaje neosetljiv na nagle promene:
Figure 4.19: Dinamick odziv jako prigusenog klinomera (merilo nagiba) za razlicite nagle promene nagiba
Sistemi nultog reda imaju samo clan k (na primer potenciometar):
k ψ = φ
(4.4)
Figure 4.20: Izlaz usled jedinicnog ulaza, magnituda i fazni ugao frekventnog odziva mehanickog sistema nultog reda
Po pravilu su hidraulicki sistemi slozeni sistemi drugog reda, jer se kombinuje masa vode (m), trenje i viskoznost (k) kao i kapacitivni deo (c) u formi promene zapremine kroz vreme.
Primeri hidraulickih sistema:
Figure 4.21: Izlaz iz kanala u mirnom rezimu
Sistem na slici 4.21 je prvog reda ako snizenje nivoa ne znaci pove\'canje protoka, a ako se pove\'cava protok onda je sistem drugog reda.
Sistem na slici 4.22 je sistem drugog reda.
Figure 4.22: Merenje fluktuacija pritisaka u slapistu
Figure 4.23: Vezba iz odredjivanja transfer funkcije mernog sistema na osnovu fluktuacija pritisaka u slapistu
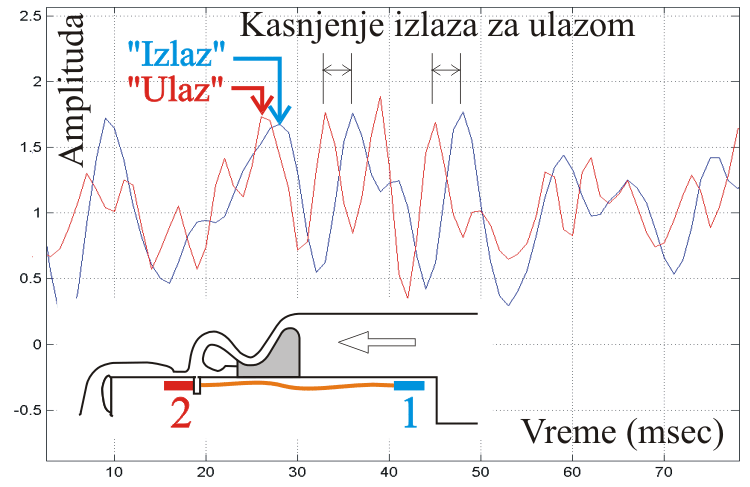
Figure 4.24: Fluktuacije pritisaka ispred pijezometarskog creva (crvena dijagram) i posle creva (plavi dijagram)
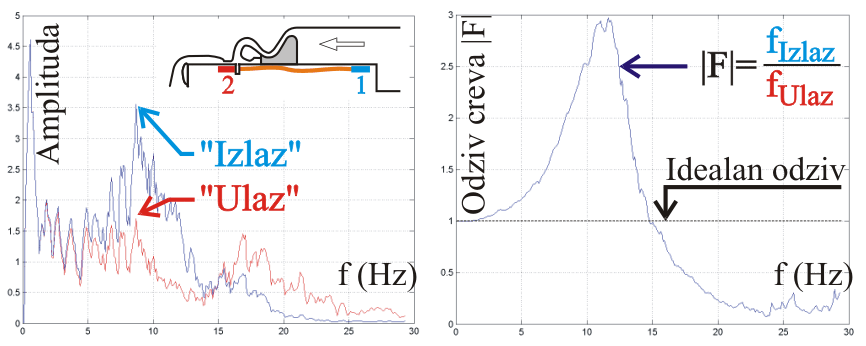
Figure 4.25: Spektar fluktuacija pritisaka ispred i iza pijezometarskog creva (levi dijagram) i transfer funkcija pijezometarskog creva (desni dijagram)