Univerzitet u Beogradu
GRAĐEVINSKI FAKULTET
Nemanja Branisavljević
Large Scale Particle Image
Velocimetry (LSPIV) –
merenje urbanog oticaja
Seminarski rad
Doc. dr Dušan
Prodanović
Merenja u
hidrotehnici
Sadržaj
Rezime 3
Uvod 4
Neinvazivne
optičke metode merenja polja brzina 6
LSPIV 8
LSPIV
procedura 9
Testiranje
softvera 12
Merenje
polja površinskih brzina toka u rigoli uzvodno od slivnika 13
Zaključak 16
Literatura 17
Rezime
Terenska
merenja brzina i protoka je široko rasprostranjena i poznata hirološka
disciplina neophodna za osmatranje i proučavaje hidroloških procesa. Mali oticaji
koji se formiraju u urbanim područijima za vreme i nakon kišnih epizoda
obično su sa malim dubinama što otežava njihovo određivanje
tradicionalnim metodama i uređajima. Nova metoda, Large Scale Particle
Image Velocimetry (LSPIV), bazirana na procesiranju slike, je uvedena u
hidrološku praksu poslednjih godina kao neinvazivna metoda koja se upotrebljava
kod određivanja polja površinskih brzina otvorenih tokova. U ovom radu
LSPIV je primenjena na terenskom merenju urbanog oticaja u rigoli za vreme
jedne umerene kišne epizode u Beogradu.
Ključne reči: Large Scale Particle Image Velocimetry, merenje brzina kod urbanog
oticaja
Uvod
U
analizi urbanog oticaja protok vode ima vrlo važnu ulogu [7]. Neophodan je kako kod
određivnja bilansa voda, tako i kao ulazni parametar za analizu dinamike
voda u urbanim uslovima. Kod analize oticaja sa sliva ili bilansa voda protok
se javlja kao rezultat, dok se kod analize dinamike u kanalizacionom sistemu
protok koristi kao ulazna veličina. I u jednom i u drugom slučaju protok (posredno i brzina) je neophodna
veličina za analizu i tačnost ove dve vrste modela i ima
značajan uticaj na njihov rezultat. Tradicionalno, merenje protoka na urbanom slivu se izbegavalo pronalaženjem zavisnosti
intenziteta kiše na tom slivu i protoka u kanalizacionom sistemu gde se protok
mogao meriti na unapred definisanim mestima. Na ovaj način nije bilo
potrebe za informacijama o protoku na ulazu u slivnik, već su se
osrednjeni koeficijenti o sastavu i upotrebi zemljišta koristili za njegovu
procenu. Na ovaj način greška se uvećavala i na spoju dva
konceptualno različita ali povezana modela: modela oticaja sa sliva i
modela kanalizacionog sistema.
Podatak o protoku je direktno zavistan od podatka
o brzini toka. Integral brzine po poprečnom preseku daje nam protok, pa je
dovoljno poznavati polje
brzina, dubinu i geometriju korita da bi se sračunao protok [2].
U urbanim uslovima, merenja brzina su
izvođena samo onda kada je dubina toka bila dovoljna za upotrebu
tradicionalnih merila (konstruisanih uglavnom na principu propelera). Na žalost
kod plitkih tokova, ispod 10 cm dubine, tradicionalni merni instrumenti nisu
mogli da daju dovoljno tačne rezultate merenja jer su vrlo osetljivi na
lokalne poremećaje koje sami prave u toku. Kod malih dubina čak i
nove vrste instrumenata, kao radarski sistemi, posebno projektovani za
neinvazivno merenje površinskih brzina kod otvorenih tokova, bazirani na
merenju doplerovog pomaka reflektovanih od talasa, imaju problema [1].
U poslednjih 20 godina, novi pristup merenju polja
brzina, baziran na obradi slika, je predstavljen naučnoj javnosti [1].
Kada su računari postali dovoljno moćni za obradu velikog broja
podataka u algoritmima koji se bave obradom slika, novi princip merenja je
dobio na popularnosti ali je uglavnom primenljivan u laboratorijskim uslovima.
Neki od algoritama su prilagođeni merenjima u terenskim uslovima i u ovom
radu biće prikazan jedan od njih. Primer njegove primene biće prikazan na određivanju polja
brzina u toku duž rigole pored parkinga ispred zgrade Instituta za Hidrotehniku
i Vodnoekološko Inženjerstvo.
Neinvazivne optičke metode merenja polja brzina
Iz ugla razvoja neinvazivnih optičkih metoda
merenja brzine fluida u poslednjih 20 godina pažnja je bila okrenuta metodi
Particle Image/Tracking Velocimetry, gde
se merenje brine fluida bazira na praćenju delića zasejanih u
fluidnoj struji. Rezultat merenja je polje brzina u dve, ređe u tri,
dimenzije, uglavnom prikazanih strelicama koje representuju intenzitet, pravac
i smer vektora brzine u nekoj tački, osrednjene u prostoru.
Suština metode Particle Image Velocimetry (PIV) je
autokorelacija i/ili kroskorelacija dva dela dve slike, snimljene u t1
i t2 vremenskim trenucima [3]. Brzina se registruje kao pomeraj dela
slike u intervalu vremena dt=t2-t1. Da bi se ovo postiglo
prilikom pripreme podataka slike se izdele na segmente (ispitivane regione)
koje određuju minimalne i maksimalne brzine koje se mogu odrediti.
Najčešća kroskorelaciona metoda koja se koristi u ovoj tehnici je
bazirana na 2DFFT transformaciji slike, dok se veličina ispitivanih
površina određuje na osnovu rezolucije slike, veličine trasera
(kontrasta na slikama) i željene rezolucije vektora brzina.
Particle Tracking Velocimetry (PTV) je bazirana na
praćenju delića u toku pojedinačno, i na optimizaciji upoređivanja dve
uzastopno snimljene slike tako da dobijeni vektori brzina izgledaju što
prihvatljivije (nema nerealnih vektora brzina).
Ograničenja ova dva pristupa je što su oni
testirani uglavnom u laboratorijskim uslovima dok je van laboratorije upotreba
ovih metoda ograničena. Proširenje PIV i PTV metoda je Large Scale PIV
(PTV), metoda uglavnom korišćena pri analizi otvorenih tokova. U ovom radu
biće prikazan test razvijenog softvera za LSPIV, na plitkom toku u rigoli
tokom umerenog kišnog događaja u Beogradu.
LSPIV
Large Scale PIV (LSPIV) se uglavnom koristi za
površinske profile brzina kod analize otvorenih tokova. Procedura se sastoji
iz:
1) zasejavanja površine toka svetlim, ekološkim i neprovidnim materijalom
(materijal treba da je u dobrom kontaktu sa tokom sa kojim treba da bude u što
većem kontrastu),
2) snimanje dve ili više fotgrafija sa definisanim vremenskim korakom dt,
3) podela fografija na ispitivane regione,
4) računanje i poređenje
kroskorelacionih koeficijenata između ispitivanih regiona,
5) upotreba postprocesnih tehnika za
uklanjanje grešaka u dobijenom polju brzina,
6) vizuelizacija polja brzina.
LSPIV procedura
Materijal,
izabran za zasejavanje toka, treba da bude neprovidan, u kontrastu sa tokom i
da ne pravi senku (da dobro prijanja uz vodenu površinu). Zasejavanje se
uglavnom obavlja ručno pomoću belih papirnih konfeta (u našem
slučaju prečnika d=0.5 cm) ili sličnog materijala. Preporučuje
se snimanje više snimaka (serije fotografija) sa različitom gustinom
zasejanja.

Slika 1: Zasejavanje toka
Preporučuje
se i difuzno osvetljenje koje ne pravi oštre senke od kapljica kiše koje padaju
na tok (ukoliko se meri za vreme kišne epizode) ili vegetacije koja se pomera pod
uticajem vetra. U svakom
slučaju potrebno je napraviti više snimaka pa odabrati najbolje.
Zatim se iz snimka izdvoje dve ili više
fotografije sa definisanim vremenskim korakom dt. U našem slučaju dt=0.6
secundi. Izbor dt intervala vremena zavisi od intervala brzina koje se javljaju
u toku. Ukoliko je brzina toka velika, potrebno je manje dt.


Slika 2: Dve fotografije snimljene u
intervalu dt=0.6 sec
Nakon snimanja fotografija potrebno je fotografije
podeliti na ispitivane regione. Ispitivani regioni su uglavnom kvadratnog
oblika, mada mogu biti i pravougaonog. Da bi se iskoristila mogućnost rada brzog
algoritma 2D Furijeove transformacije, poželjno je da ispitivane površine budu
2nx2n pixela.
Slika 3: Fotografije podeljene na
ispitivane regione 16x16 pixela

Slika 4: Fotografije podeljene na
ispitivane regione 32x32 pixela i 64x64 pixela

Slika 5: Kroskorelacija ispitivanih regiona
Nakon
dobijanja matrica korelacije i utvrđivanja gde se pomerio koji ispitivani
region (maksimalni pik matrica korelacije), rezultati se čiste i uklanjaju
se greške. Greške mogu nastati na više načina. Neki od uzroka su
nedovoljna zasejanost toka, loše izabrana veličina ispitivanih regiona ili
nemogućost da se pronađe gde se neki region pomerio (matrica
korelacije nema jasan pik). Greške se ispravljaju interpolacijom ili kriging
tehnikama [5], [6].
Nakon
proračuna, vektori brzina se vizuelizuju. Iz vizuelizovanog polja
površinskih brzina mogu se dalje generisati strujnice ili protok, ali to
prevazilazi okvire ovog rada.
Testiranje softvera
Softver,
razvijen u MatLab okruženju [4], je prvo testiran na sintetički
generisanim slikama. Prvi set slika (slika 6) predstavlja slučajno
raspoređene bele tačke po crnoj podlozi koje su pomerene za u=0.5 i
v=0.5.
Drugi set (slika 7) predstavlja takođe bele
tačke na crnoj podlozi zarotirane za p/35.
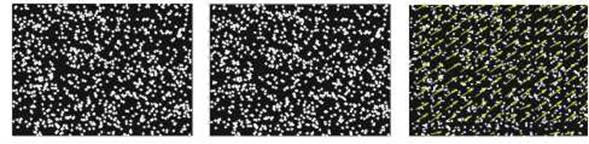
Slika 6: Testiranje softvera 1

Slika 7: Testiranje softvera 2
I kod prvog i kod drugog testa može se uočiti problem kod vektora
brzina na ivici slike. To je
u literaturi poznat problem kod PIV tehnika i može se prevazići pažljivim
odabirom regiona od interesa i njegovim smeštanjem u sredinu
fotografija/snimaka.
Merenje polja površinskih brzina toka u rigoli uzvodno od slivnika
Metoda
je primenjena na određivanju polja brzina toka u rigoli neposredno pre
slivnika za vreme umerenog kišnog događaja u Beogradu. Dimenzije ivičnjaka koji formira
jednu od stranica rigole su prikazane na Slici 8. U toku umerenog kišnog
događaja voda je formirala plitak tok ka slivniku na najnizvodnijem delu
podsliva (parkinga ispred zgrade Instituta Tehničkih fakulteta u Beogradu,
Ruzveltova 1).
Tok je snimljen kamerom Sony
DCR-HC18E handycam dok je softver napisan u MatLab programskom okruženju
[4]. Iz snimljenog materijala je izvučeno 20 fotografija sa vremenskim
intervalom dt=0.6 sekundi rezolucije 800x600 pixela.
Nakon preprocesiranja i vizuelne
inspekcije slika, prve dve slike su podejene na ispitivane regione
veličine 16x16 i 32x32 pixela. Nakon obrade, ispravljanja grešaka i
vizuelizacije dobijeni su rezultati (slike 9 i 10).

Slika 8: Rigola
neposredno uzvodno od slivnika

Slika 9: Vektori brzina (16x16 pixela)
Slika 10: Vektori brzina (32x32 pixela)
Vektori koji nemaju smisla na slici polja brzina
predstavljaju odgovot metode na šum slike. Šum slike je pre svega nastao
pomeranjem kamere (sve je snimano iz ruke), a delom i usled senke koje su
nastale od kapljica kiše. Dodatno ispravljanje grešaka obavljeno je
ponavljanjem postupka generisanja
vektora brzina sa ostalih 20 fotografija i otklanjanja šuma slike.
Nakon dodatnog čišćenja iz seta od 20 slika,
otklanjanjem šuma slike, pri čemu je šum smatran slučajnom pojavom
koja se javlja po normalnoj raspodeli:

Slika 11: Konačno strujno polje (uklonjen šum slike)
Zaključak
U
ovom radu prikazan je jedan, još uvek nestandardan, postupak određivanja polja
površinskih brzina kod otvorenih tokova. Prednosti ovog postupka su
mnogobrojne. Pored jednostavnosti samog postupka snimanja, naglasak se može staviti na prednosti koje donosi
ključni deo merenja koji se obavlja za računarom u toku
postprocesiranja. Osim što je
neinvazivan i jeftin, ovaj postupak je i brz.
Literatura
[1] Prodanovic D. (2005), Bezkontaktno merenje protoka u kanalizaciji, 26. Savetovanje
Vodovod i Kanalizacija 137-146
[2] Jovanović M. (2002), Regulacija reka - rečna hidraulika i
morfologija, Građevinski fakultet Univerziteta u Beogradu
[3]
Stanislas M., Kompenhans J.,
Westerweel J. (2000), Particle Image
Velocimetry – Progress towards Industrial Application, Springer
[4] MatLab 7.1 (2006), User’s Manual
[5] Weitbrecht V., Ku¨hn G., Jirka G.H.(2002), Large
scale PIV-measurements at the surface of shallow water flows, Flow
Measurement and Instrumentation 13 (2002) 237–245
[6] Creutina
J.D, Muste M., Bradleyb A.A., Kimb
S.C., Krugerb A. (2003), River gauging using PIV techniques: a proof
of concept experiment on the Iowa River,
Journal of Hydrology 277 (2003) 182–194
[7]
Čedo Maksimović. (1993),
Merenja u hidrotehnici,
Građevinski fakultet Univerziteta u Beogradu