Mada su predmet istrazivanja uglavnom tecnosti, ve\'cina opisanih metoda za merenje brzina se moze primeniti i za gasove - pa u naslovu stoji "Fluidi".
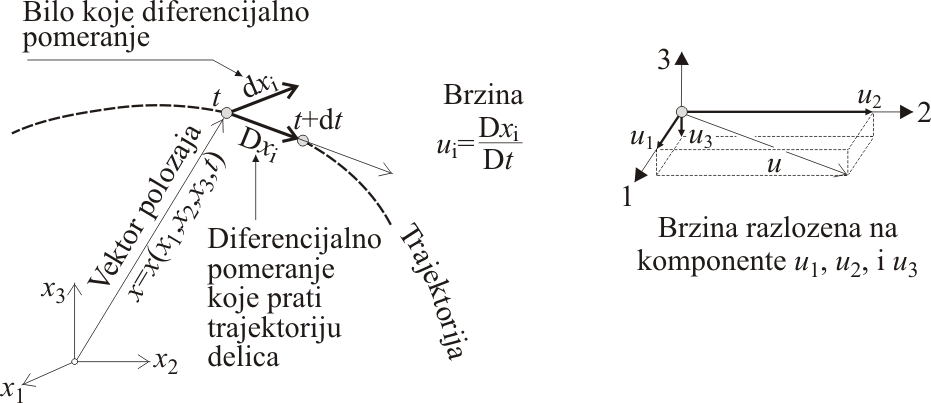
Brzina se u fluidnom polju vezuje za materijalni deli\'c (neizmerno malena masa fluida potpuno ispunjena materijom kre\'ce se po zakonima koji vaze i za tela, moze da menja oblik ali ne i masu) i njegovo pomeranje za Dxi (veliko D znaci izvod d ali prate\'ci deli\'c),:
ui =
Dxi
Dt
Figure 8.1: Brzina fluidog deli\'ca i njene komponente [32]
Brzina je vektor [(u)\vec] sa komponentama u1 , u2 i u3 . Kod fluida je brzina vektorsko polje jer svaka tacka polja moze imati drugu brzinu koje se menja sa vremenom [33]:
®
u
=
®
u
( x1, x2, x3, t )
Naravno, brzine i promene brzina po polju ne mogu biti haoticne, ve\'c moraju pratiti osnovne zakone odrzanja mase, kolicine kretanja i energije. Za ustaljeno kretanje (nema promena po vremenu) i homogen fluid (nema promene gustine po prostoru) iz zakona odrzanja mase sledi uslov:
dui
dxi
=0 odnosno
du1
dx1
+
du2
dx2
+
du3
dx3
=0
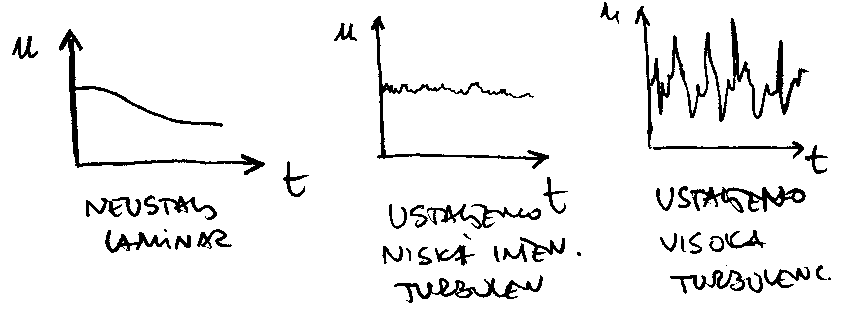
Prema slozenosti polja brzina, tok se deli na:
Ustaljeni i neustaljeni, preme tome da li brzina zavisi od vremena
1D, 2D ili 3D prema tome da li se brzine menjaju u 1, 2 ili 3 pravca
Laminarni i turbulentni, gde turbulentni moze biti sa ustaljenom srednjom vrednosti ili neustaljenom, a nivo turbulencije nizak ([(sj)/([`(j)])] ×100 < 5 % ) ili visok ( > 5%).
Figure 8.2: Brzina u funkciji vremena za razlicite rezime tecenja
Merenja brzine se obavljaju za razlicite potrebe i u razlicitim uslovima. Ne postoji jedna merna metoda ili uredjaj koji mogu zadovoljiti sve zahteve. Treba izabrati optimalnu metodu sa stanovista tacnosti, vrste podataka, raspolozivosti i cene.
U literauri se mogu na\'ci razlicite sistematizacije oblasti merenja brzina. Najces\'ca je sistematizacija prema principu rada merne opreme, odnosno, prema principu konverzije:
Mehanicki - krilo, pito-cev, roleri, ...
Elektricni - topla zica, topli film, EM, ...
Opticki - laser, traser
Ultrazvucni - transit time, dopler
...
U ovoj knjizi \'ce se primeniti sistematizacija prema dimenzionalnosti merne oblasti: na merenja u jednoj tacki, merenja duz linije i merenja u prostoru. Za svaku od oblasti \'ce se prikazati koji su svi merni principi na raspolaganju, ocekivana tacnost kao i mogu\'cnosti merenja jedne ili vise komponenti brzina kao i merenja osrednjenih i fluiktuiraju\'cih komponenti brzina.
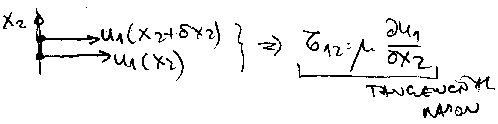
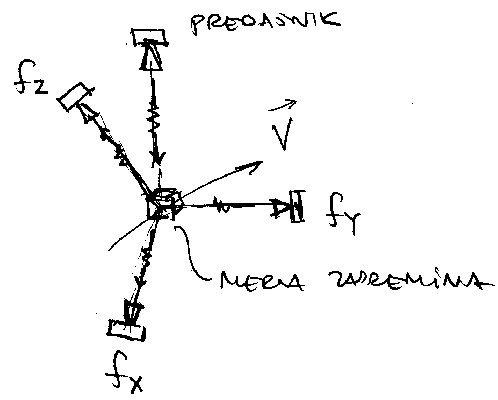
Brzine je mogu\'ce meriti u jednoj tacki, pri cemu se meri jedna komponenta (kao kod hidrometrijskog krila) ili vise komponenti istovremeno. Posebnim pretvaracima mogu\'ce je meriti istovremene fluktuacije iste komponente brzine na malom razmaku,
Figure 8.3: Fluktuacije iste komponente brzine, na malom rastojanju ¶x2
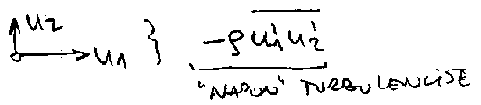
ili vise komponenti brzina,
Figure 8.4: Fluktuacije dve komponente brzine u istoj tacki
cime se dobijaju podaci potrebni za Reynold-sovu jednacinu:
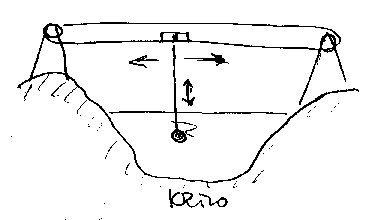
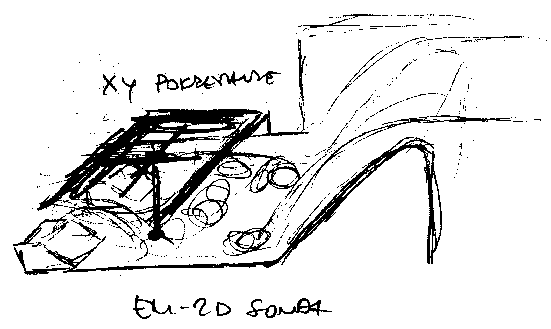
Sistemi za merenje brzine u jednoj tacki su obicno opremljeni mehanizmima za rucno ili automatsko pozicioniranje duz jednog pravca, u ravni ili u prostoru, cime se omogu\'cava snimanje kompletnog prostora brzina. Naravno, tok mora biti ustaljen i ergodican.
Figure 8.5: Pozicioniranje hidrometrijskog krila u otvorenom toku (Uzmi sliku iz OTT-ovog kataloga)
Pored brzine u tacki neki tipovi uredjaja mere osrednjenu brzinu duz jedne linije. Kod takvih metoda po pravilu se radi o srednjoj vrednosti brzine, fluktuacije su smetnja, a ne koristan podatak. U zavisnosti od metode, nacin odredjivanja srednje brzine duz linije je linearan ili nelinearan (brzine u odredjenoj zoni imaju ve\'ci doprinos). Ovakvi pretvaraci se najces\'ce koriste u merenju protoka fluida.
Sto se tice istovremenog merenja brzina u svim tackama strujnog polja poslednjih godina se intenzivno radi na razvoju metoda koje kombinuju klasicnu vizuelizaciju i numericko kvantifikovanje dobijenih fotografija. Postupci vizuelizacije su sredinom i krajem 20-tog veka bili jedini izvor informacija o prostornom polju brzina. Danas se obradom 2D i 3D fotografija (3D hologrami su dostupni samo najbogatijima - vojsci) mogu odrediti brzine deli\'ca. Metode zasnovane na obradi video snimaka su razvojem tehnologije (bolji mobilni telefoni vec mogu da rade obradu) postale dostupne ne samo laboratorijama vec i u praksi.
Uglavnom se koriste mehanicki pretvaraci, sa dodatim elektricnim izlazom. Naravno, mogu\'ce je koristiti i uredjaje koji mere trenutne vrednosti brzina, pa ih osrednjavati ili odmah unutar samog uredjaja, ili cuvati sve podatke kroz vreme, pa ih naknadno obradjivati.
Hidrometrijsko krilo
Osnovni deo krila je obrtni deo - elisa, koji se u vodi okre\'ce pod uticajem vodene struje. Upotreba krila se zasniva na predpostavci da izmedju brzine vodene struje i brzine obrtanja obrtnog dela krila postoji funkcionalna zavisnost [17].
Dva tipa krila:
Sa elisom - propelerom - postoje razliciti oblici i velicine. Vazna velicina je korak elise - put koji predje elisa u mirnoj vodi za jedan pun obrtaj (u proseku je to od 0.1 do 1.5 m).
Sa vencem casica - malo se koristi kod nas.
Figure 8.7: Hidrometrijsko krilo
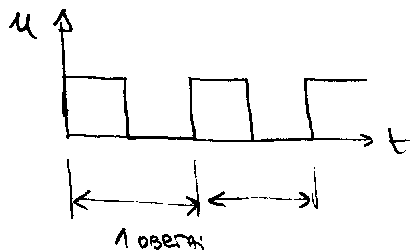
Sa krila se preko ugradjenog prekidaca dobija impulsni signal - po jedan ili vise impulsa za jedan obrtaj elise (slika 8.8).
Figure 8.8: Impulsni izlaz sa prekidaca krila
Kao registratori koriste se brojaci koji broje impulse sa krila za unapred podeseno vreme
N =
å
n
T
gde se T bira tako da ån bude ve\'ce od 100 (za 1 % greske), zavisi i od lokalnih uslova - intenziteta turbulencije itd.
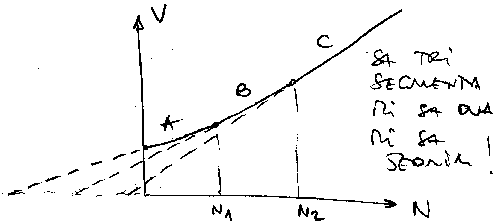
Veza izmedju broja obrtaja N i brzine se dobija kalibracijom krila. Rezultat kalibracije je prava linija, ili dijagram sastavljen iz dva ili tri segmenta pravih linija (slika 8.9).
Figure 8.9: Kalibracioni dijagram za hidrometrijsko krilo
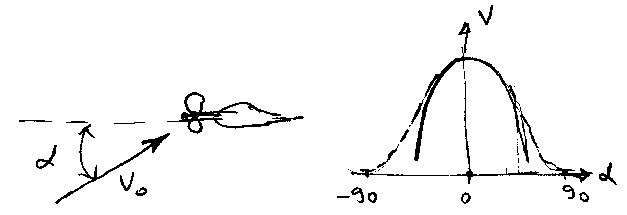
Zavisnost pokazivanja hidrometrijskog krila od ugla vektora brzine se mora posebno ispitati i konstruisati dijagram kao na slici 8.10.
Figure 8.10: Uticaj ugla vektora brzine na rad hidrometrijskog krila
Posebna krila komponentna krila pokazuju V0 ×cosa za a < 500 a izvan tog ugla registruje manju brzinu1
Kod merenja na manjim rekama, gde je moguce "pregaziti" merni profil, krilo se obicno drzi montirano na vertikalnom stapu koji omogu\'cava pozicioniranje po dubini ( KLIKNI za sliku)
Kod merenja na velikim rekama, krila se obicno montiraju na posebne nosace, torpeda ( KLIKNI za sliku) koja obezbedjuju uvek upravan smer vode na krilo. Da bi se tacno izmerio protok, ako postoji zakrivljenje strujnica, neophodno je meriti ugao torpeda u odnosu na poprecni presek!
Uticaj pulzacija brzina - pojam "sinhronizacije" - duzina toka koja treba da prodje pored krila da bi se okretanje elise prilagodilo novoj brzini:
LSINHR
VTOKA
= TSINHRO
pa sto je ve\'ce [`(V)] , krilo se brze prilagodjava. Ako je TSINHRO < TOSCILACIJA , mogu\'ce je obradom impulsnog signala dobiti podatak o trenutnoj brzini (slika 8.11).
Figure 8.11: Brzina se moze dobiti i obradom samo jednog impulsa
(Dodati i mikrokrila kao sonde koje mogu da se ubacuju u cev pod pritiskom - Spectrascan - uzeti sliku iz nekog prospekta!)
Figure 8.12: Mikrokrilo za merenje brzine u cevi, pod pritiskom
Kada nije potrebno tacno merenje brzine, ve\'c samo indikacija postojanja brzine (na primer, jeftin sistem za indikaciju protoka u cevi), cesto se koristi turbinski davac u obliku pedale: KLIKNI za sliku turbinske sonde ([2])
Pitoova cev
(Mister Pitot - ima lepa slika kod Cede u komunalnoj hidrotehnici, poglavlje IV.4, Slika IV 26.)
Veoma cesto se koristi za tecnosti, ali i za gasove, jer je najjeftiniji nacin za merenje.
Figure 8.13: Pitoova cev za merenje brzine u tacki preko zaustavnog pritiska
Standardna izvedba sa jednom cevi za ukupan pritisak na vrhu i vise bocnih otvora sa strane za staticki pritisak. Nije osetljiva mnogo na pravac vektora brzine (u konusu od ±150 ). Sa dobrim manometrom ima mernu nesigurnost sp = 0.5 % za pritisak, odnosno sv = 0.25% za brzine. Problem predstavljaju male brzine jer treba meriti male razlike pritisaka (pogotovu u vodi gde mehuri prave probleme). Za brzine u vodi od 1 m/s, Dp = 5 cm vodenog stuba, a za brzinu od 0.1 m/s Dp koje treba meriti je svega 0.5 mm vodenog stuba.
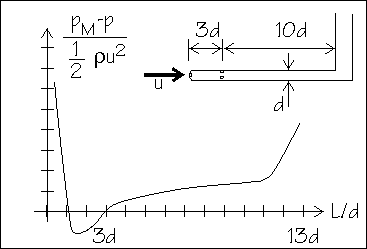
Kod Pitot cevi potrebno je postaviti otvore za hidrostaticki pritisak na tacno odredjenom mestu.
Figure 8.14: Dijagram za odredjivanje polozaja rupe za merenje hidrostatickog pritiska na Pitot sondi
Kod kompleksnih strujnih slika koriste se Pito cevi sa vise otvora, jedan za staticki pritisak, a ostali za ukupni pritisak za razlicite komponente brzine.
Figure 8.15: Sonda sa 5 Pito-cevi i jednom za hidrostaticki srednji pritisak moze da dâ pravac vektora brzine
Ovakve sonde su komplikovane za koris\'cenje. Mogu\'ca su dva pristupa:
Sonda se okre\'ce u prostoru dok se ne postigne da 4 okolne cevcice u glavi sonde ne pokazuju isti pritisak - tada je polozaj vektora poznat, a intenzitet daje sredisnja cev
Sonda miruje ali je obrada svih pritisaka komplikovana - potrebna je i komplikovana kalibracija.
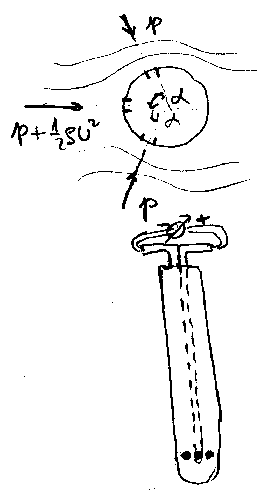
Cesto se koristi i jednostavnija varijanta koju cini sfera ili cilindar i obicno tri otvora za merenje pritiska - jedan na celu (meri se ukupan pritisak) i druge dve na mestu gde je pritisak jednak neporeme\'cenom statickom pritisku.
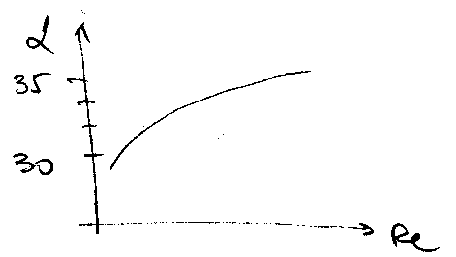
Figure 8.16: Sonda sa tri cevcice, zgodna za uvlacenje u cevi pod pritiskom
Figure 8.17: Zavisnost ugla a (na slici 8.16) od Re broja
(Za knjigu pogledati jos: Fundamentals of Temp, Press, and Flow Measurements, R.P. Benedict, Chap. 17, pages 355- ima dosta o Pitot sondama - jedan deo materijala staviti i na kraj poglavlja o merenju pritiska)
Anemometri - pretvaraci koji daju trenutnu brzinu fluida.
Anemometrija - oblast koja se bavi merenjima srednjih vrednosti i fluktuacija brzina.
Induktivni tackasti pretvarac
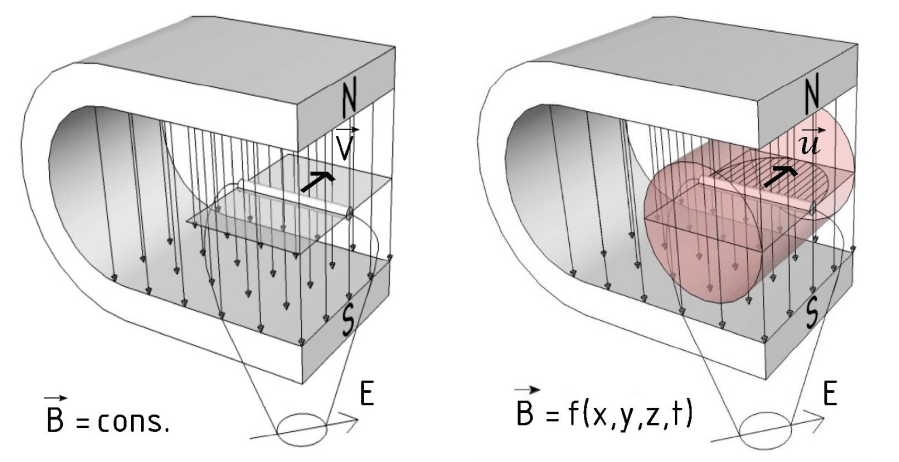
Induktivni - ili elektromagnetni (EM) pretvaraci rade na principu Faradejevog zakona indukcije:
Figure 8.18: Princip elektromagnetne indukcije koji se koristi i kod merenja brzine fluida
Ako se provodnik duzine l kre\'ce brzinom [(u)\vec] u homogenom magnetnom polju [(B)\vec], na krajevima zice se indukuje elektromotorna sila intenziteta:
e =
ó õ
L
®
B
×
®
u
dl
pri cemu je e isto sto i napon U samo sa velikom unutrasnjom impedansom - pa ne moze da dâ struju!
Ovaj princip se prvo koristio za merenje protoka u cevi, gde se oko cevi pravi magnetno polje , a provodni fluid je "zica" koja se kre\'ce brzinom [(u)\vec] . O ovome \'ce biti vise reci u poglavlju ... .
Medjutim, moze da se koristi i za merenje brzine u "tacki".
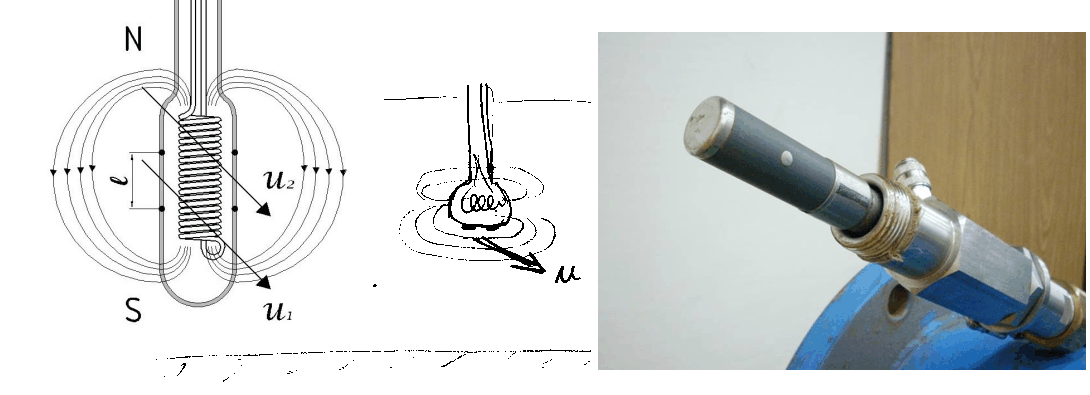
Figure 8.19: Elektromagnetne sonde za merenje brzine vode (provodnog fluida) u "tacki"
Postoje razlicite konstrukcije, precnik "glave" je od 9 mm pa navise, a razmak izmedju elektroda l od 5 do 15 mm. Brzine se mere u rasponu od 1 cm/s pa do 5 m/s ili vise (zavisi od oblika sonde). U celom opsegu brzina pretvarac je linearan.
Mada je osnovni princip rada prost, indukovana elektromotorna sila nosi i niz parazitnih komponenti:
e = eV + eC + eL + eDC + eSMET
gde su: eV - koristan signal usled brzine [(V)\vec] , eC i eL - kapacitivna i induktivna smetnja usled naizmenicne pobude, eDC - jednosmerni signal usled elektrohemijskih potencijala i eSMET - ostale smetnje - lutaju\'ce struje, nagle promene provodnosti tecnosti, itd.
eDC i eSMET - se izbegavaju ako je tecnost homogena (sa homogenom koncentracijom jona), bez mehuri\'ca. Ove smetnje su u opsegu od 0 do 7 Hz pa se obicno pretvaraci koriste na frekvencijama 12, 15 i 30 Hz, sto ogranicava i maksimalnu frekvenciju korisnih vrtloga.
Nacin pobude pretvaraca:
Koristi se kvadratna pobuda elektromagneta:
Figure 8.20: Struja pobude elektromagneta sonde (gornja slika) i izlazni napon sa elektroda (donja slika)
Uizl = E1 - E2
pa se potiskuju eDC i eSMET
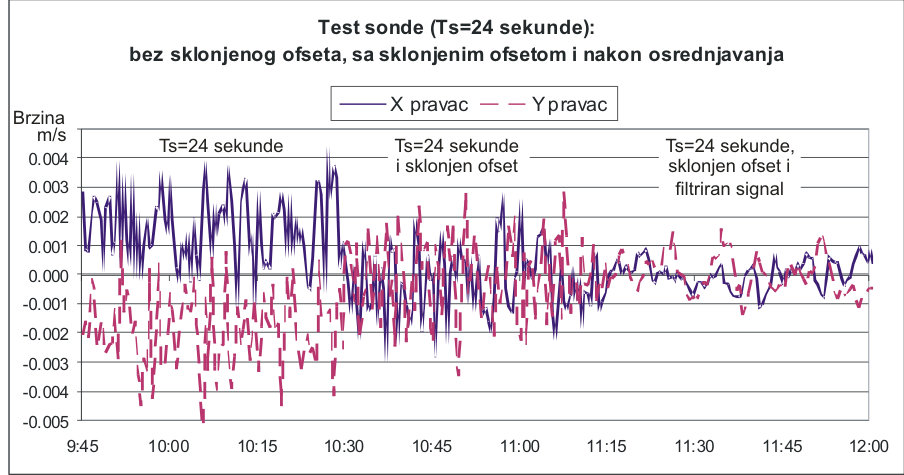
Mada je mogu\'ce dobiti izlaznu brzinu ve\'c nakon T = [1/(fpob)] , samo jedne periode merenja, obicno se osrednjava barem desetak merenja, cime se potiskuje slucajna komponenta smetnji.
Figure 8.21: Primer smanjenja suma osrednjavanjem merenja (uz prethodno otklanjanje i ofseta)
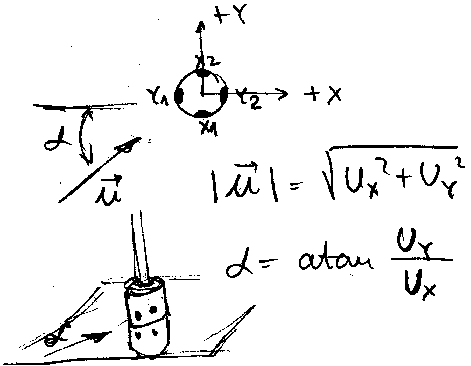
Velika prednost EM sondi je sto je mogu\'ce meriti komponente brzina. Kod cilindricnih sondi, izlazni napon je direktno proporcionalan vektoru brzine cosa.
pri cemu sonda meri i negativne vektore - razlikuje se smer toka!
Prave se i 2D sonde - za vektor koji lezi u ravni ciji je ort telo sonde.
Figure 8.23: Elektromagnetna sonda sa dva para elektroda meri intenzitet i ugao vektora brzine u ravni u kojoj su elektrode
|
®
u
| =
Ö
ux2 + uy2
a = arctan
uy
ux
Idealna EM sonda treba da ima sto manji precnik glave (koji remeti tok), manje elektrode i na kra\'cem rastojanju. Sve to vodi ka nizem izlaznom potencijalu i ve\'coj osetljivosti na smetnje. Za kvalitetno merenje potrebno je:
sto jace polje [(B)\vec]
sto ve\'ce elektrode
sto ve\'ci razmak elektroda
EM sonde su dobre za snimanje sednjih brzina sa niskom turbulencijom ili sa periodama oscilacija do 10-ak Hz (0.1 sec).
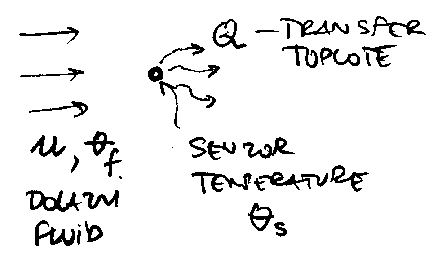
Koriste se za merenje fluktuacija brzine. Rade na principu odvodjenja toplote sa senzora - stepen hladjenja je proporcionalan brzini fluida (slika 8.24). Topla zica se koristi za merenja u vazduhu a topli film za merenja u provodnim tecnostima.
Figure 8.24: Princip rada senzora na bazi tople zice (ili filma)
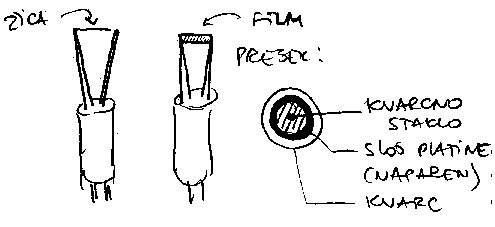
Kao senzor koristi se najces\'ce platina ili volfram. Topla zica je debljine 5 do 10 mm, i duzine do 5 mm i koristi se u vazduhu. U vodi se koristi tanak film platine na kvarcnoj osnovi i izolovan kvarcnom prevlakom.
Senzori se mogu praviti raznih oblika, tako da se lako prilagodjavaju mernim zahtevima.
Figure 8.25: Izgled i presek standardnog senzora sa toplom zicom i sa toplim filmom
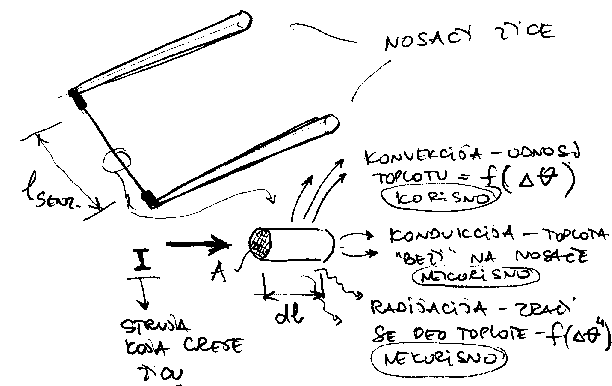
Kroz zicu senzora duzine lSEN, precnika d i povrsine poprecnog preseka A i ukupnog otpora R, tece struja I i predaje ukupnu snagu P=I2R. Posmatranjem malog dela zice, duzine dl moze se napraviti toplotni bilans:
Figure 8.26: Toplotni bilans: zica se greje proporcionalno razlici ulaza u sistem i izlaza preko konvekcije, kondukcije i radijacije
Ulaztoplote:
I2 rR
A
dl
(gde je rR specificni otpor zice, u [W/m]) se trosi na slede\'ca tri "izlaza": konvekciju (ono sto odnosi fluid, korisni deo izlaza), kondukciju (toplota koja se prenosi na nosace zice, nekorisni deo) i radijaciju (zracenjem se odnosi jedan deo toplote, nekorisno).
Konvekcija:d ×p×h ×(qS-qF) dl
gde je d precnik zice a h koeficijenat konvekcije, qS temperatura senzora i qF temperatura fluida
Kondukcija:
d2p
4
×
¶
¶l
æ è
Ks ×
¶q
¶l
ö ø
dl
gde je KS koeficijenat kondukcije
Radijacija:d ×p×si ×e×( qS4 - qF4 ) dl
gde je si Stephan-Boltsman-ova konstanta a e emisiona konstanta.
Razlika izmedju ulaza i izlaza odlazi na pove\'canje temperature senzora:
rR ×C ×
¶qS
¶t
dl
(Nadji knjigu ... Fundamentals of hot film anemometry - fotokopija, plavo ukoricena... i proveri izraze i malo ih sredi. Ovi ovde su prema Cedinim beleskama. Pogledaj i kod Stankovica - tamo su izrazi koji naginju ka otpornosti, pa su i malo konkretniji. Takodje, dobra literatura su i TSI manuali)
Postoje dva razlicita principa rada: sa konstantnom strujom i sa konstantnom temperaturom.
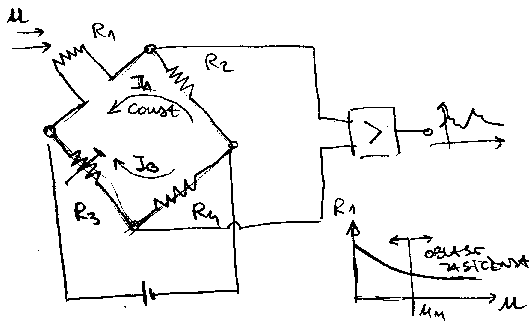
Merenje sa konstantnom strujom:
Figure 8.27: Merni most za anemometre sa konstantnom strujom - izlazni napon brzo ulazi u zasi\'cenje
Za IA >> IB - ve\'ci deo struje ide kroz R1 i R2 , pa se zica ( R1 ) zagreva na Q = 1200C - 2000C , a u vodi na 30 - 400C .
Pomo\'cu R3 se most balansira, a cesto se R3 kombinuje sa termometrom cime se kompenzuje eventualna promena temperature fluida u toku merenja.
Relativno prost merni most sa dobrom dinamickom karakteristikom, ali ima uzak opseg mernih brzina i brzo dolazi do zasi\'cenja.
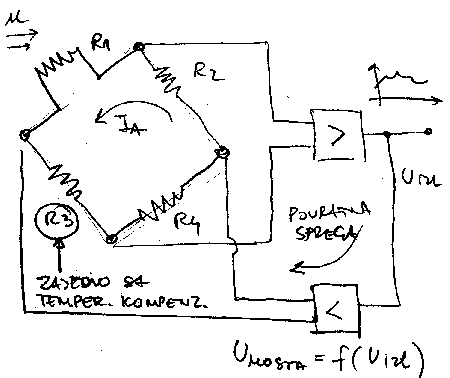
Merenje sa konstantnom temperaturom:
Figure 8.28: Merni most za anemometre sa konstantnom temperaturom - povratnom spregom se struja kroz zicu tako menja, da temperatura senzora ostaje konstantna
Jacina struje IA vise nije konstantna, ve\'c se menja u zavisnosti od izlaznog napona Uizl , tako da pri ve\'cim brzinama, kada konvekcija odnese vise toplote i smanji se otpornost, poraste napon mosta Umosta i pove\'ca se IA kao i zagrevanje R1 , dok se ne postigne prethodna temperatura.
U analizi rada anemometra sa konstantnom temperaturom, koristi se Kingov zakon odvodjenja temperature sa beskonacne zice:
I2 ×rR
QS - Qf
= A0 + B0
Ö
Re
gde je Re = [(u ×d)/(n)] .
(Videti Discharge and Velocity Measurements, Zürich, B7-6: Hot-film and Hot-wire anemometers, H. Eckelmann:
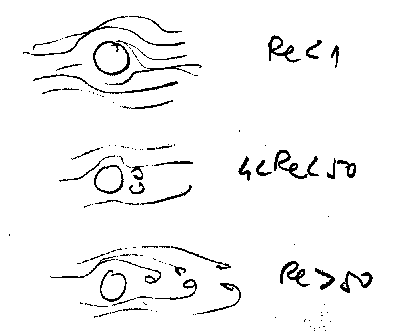
Koeficijenat B0 zavisi od QS ali i od uslova opstrujavanja oko zice. Na primer, u vodi, za U=1 m/s i precnik zice d=50 mm, Reynolds-ov broj je Re=50. Za opseg Re brojeva od 1 pa do preko 50, strujna slika oko zice se znatno menja (slika 8.29).
Figure 8.29: Strujnice oko tople zice u zavisnosti od Reynolds-ovog broja
Sa slike 8.29 se vidi da se mora koristiti izraz BÖu ili BÖ{Re}, u zavisnosti od oblasti Re brojeva.
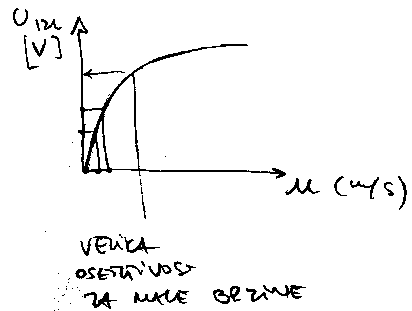
Koristi se cesto i veza izlaznog napona i brzina:
Uizl2 = A + B ×U0.5
sto daje zavisnost 4-tog stepena: velika osetljivost je za male brzine fluida.
Figure 8.30: Zavisnost izlaznog napona mernog mosta U od merne brzine u
Prednost u odnosu na konstantnu struju je sto nema zasi\'cenja u oblasti ve\'cih brzina. U dinamickom pogledu je, zbog povratne sprege, veoma slozen sistem.
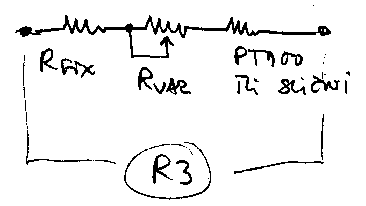
I kod uredjaja koji rade sa konstantnom strujom i kod onih koji rade sa konstantnom temperaturom, mora postojati temperaturna kompenzacija. Uobicajeno je da se otpornik R3 kombinuje sa temperaturno osetljivim otpornikom, koji meri trenutnu temperaturu fluida i tako kompenzuje spore promene temperature okoline, koje bi inace dale lazni signal.
Figure 8.31: Merni most za anemometre (i sa konstantnom strujom i sa konstantnom temperaturom) mora imati i temperaturnu komenzaciju
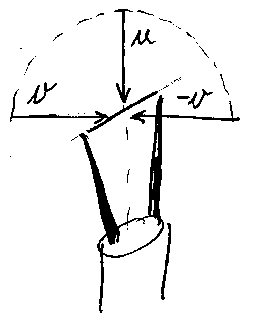
Osnovni nedostatak tople zice je veoma komplikovana prostorna obrada podataka.
Figure 8.32: Senzor sa samo jednom zicom ne razlikuje smer - sva tri vektora daju isti izlazni signal
Figure 8.33: Osetljivost tople zice je priblizno po kosinusnom zakonu ali se mora se poznavati osnovni pravac vektora brzine
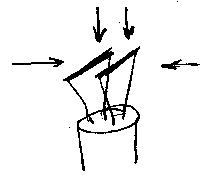
Figure 8.34: Da bi se razlikovale komponente brzine koriste se razliciti aranzmani zica
Figure 8.35: Pomo\'cu "V" senzora mogu\'ce je odrediti ugao vektora brzine u ravni senozra
Topli film sonde se uglavnom koriste u laboratorijskim merenjima. Zahteva se dobro poznavanje merne opreme tako da se sonde biraju strogo u zavisnosti od onoga sto se zeli izmeriti.
Mogu\'ce su verzije sondi za merenje dve ili tri istovremene komponente brzine, ali je njihova geometrija a i kasnija obrada podataka znatno slozenija.
Prave se i nesto "robusnije" verzije, sa integrisanom temperaturnom kompenzacijom i nesto grubljim senzorom.
KLIKNI za sliku TSI HotFilm sonde
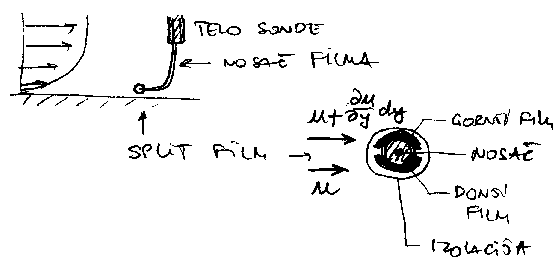
Topli film se pravi i u verziji "split film" - na istom cilindru se razdvajaju gornji i donji deo filma, pa se mere istovremene dve iste komponente brizne, na malom rastojanju (slika 8.36). Pomo\'cu takvog senzora se moze racunati tangencijalni napon, ali se moze i razluciti smer brzine.
Figure 8.36: Split film senzor, primena i izgled poprecnog preseka
Topli film senzori se prave u raznim varijantama. Za primene u grubljim laboratorijskim uslovima kao i u terenskim uslovima, cesto se pravi u konicnoj verziji, slika 8.37.
Figure 8.37: Hot film konicni senzor za grublje aplikacije
(U knjizi dati jos malo primera, za merenje t napona uza zid, 3D vektor, it.).
Laser dopler anemometrija
(Pozvati se na [26] u vezi hardware-a - optike, lasera itd.)
Laserski Doplerov anemometar (LDA) apsolutno meri brzinu deli\'ca u tecnostima i gasovima, pri cemu se pretpostavlja da deli\'ci putuju istom brzinom kao i fluid.
Radi na principu rasejavanja koherentne laserske svetlosti na cesticama dimenzija manjih od 1 mm.
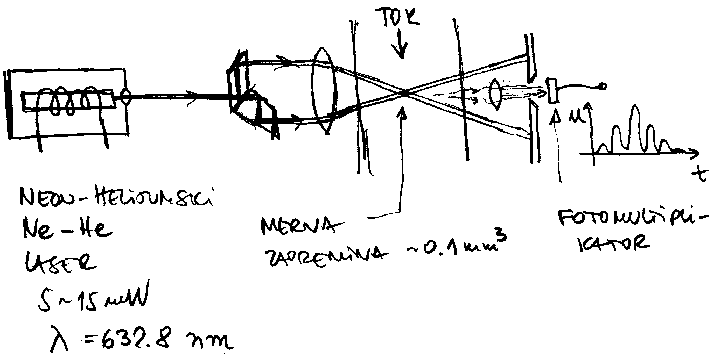
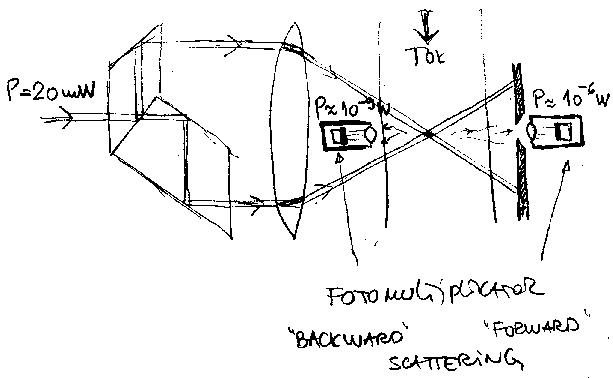
Figure 8.38: Sematski prikaz instalacije laserskog dopler anemometra
Laserska svetlost sadrzi samo jednu talasnu duzinu l (zavisi od tipa lasera), i na velikoj duzini zadrzava paralelnost.
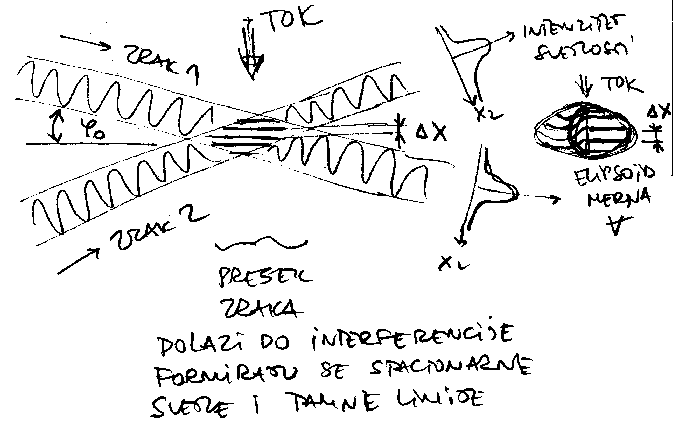
Pomo\'cu sistema prizmi svetlost se deli na dva zraka, koji se pod uglom 2j0 presecaju unutar fluidne struje - u tacki gde se meri brzina.
Figure 8.39: Princip rada LDA: deli\'c koji putuje zajedno sa fluidom, preseca tamne i svetle pruge unutar zapremine mernog elipsoida; pruge su nastale usled interferencije dva laserska zraka iste talasne duzine
Na mestu preseka zrakova, usled interferencije, javljaju se tamnije i svetlije linije, slika 8.39. Razmak izmedju linija zavisi od talasne duzine svetlosti i ugla pod kojim se presecaju:
Dx =
l
2 ×sinj0
Kada deli\'c prodje kroz mesto preseka dva zraka, brzinom V, pri svakom presecanju svetle zone raseju se svetlosni impulsi sa periodom jednakom vremenu preleta izmedju dve linije:
T =
Dx
V
=
l
V ×2 ×sinj0
Na osnovu periode preleta izmedju dve svetle linije, dobija se brzina jednog deli\'ca:
V =
Dx
T
= Dx ×f =
l
2 ×sinj0
×f
Velicine koje uticu na rezultat merenja brzine jednog deli\'ca su:
ugao j0, geometrijska velicina, koj zavisi samo od upotrebljene optike,
talasna duzina l, koja zavisi od izabranog lasera, i od
izmerene frekvencije fkoja se dobija na fotomultiplikatoru.
Sracunata brzina V je komponenta vektora brzine u ravni sa dva zraka lasera. Kako su sve velicine koje ulaze u izraz osnovne velicine (vreme i ugao), merenje brzine deli\'ca pomo\'cu LDA je apsolutno merenje, nije potrebna kalibracija uredjaja!
Na primer, za Ne - He laser, i j0 = 150
Dx =
632.8 ×10-9m
2 ×sin150
= 1.2 ×10-6m = 1 mm
Precnik zraka je » 0.15 mm. Pri V=1 m/s, f = [(v)/(Dx)] = 818 KHz odnosno, osetljivost je 818 [KHz/(m/s)] za j0 = 150.
Deli\'c koji prodje kroz mernu zapreminu emituje reflektovanu svetlost na sve strane - razlikuju se sistemi koji hvataju to svetlo sa prednje strane, "forward scattering" ili sa zadnje strane, "backward scattering":
Figure 8.40: Dve su mogu\'cnosti za hvatanje reflektovane svetlosti: sa zadnje strane "backward scattering" ili sa prednje strane "forward scattering"
Sistemi sa "forward scattering-om" imaju 100 do 1000 puta jaci izlazni signal od "backward" sistema, ali zbog toga se znatno teze koriste, podesavaju i slicno. U uslovima jako prljave vode, gde ima previse deli\'ca koji emituju svetlo, "forward" sistemi, iako sa jacim izlaznim signalom, nisu upotrebljivi. Medjutim, u vazduhu gde ima malo cestica, "backward" sistemi su neupotrebljivi jer ili nedaju nikakav signal ili jako slab. (Iz materijala iz Zürich-a, B3-2 Table 1).
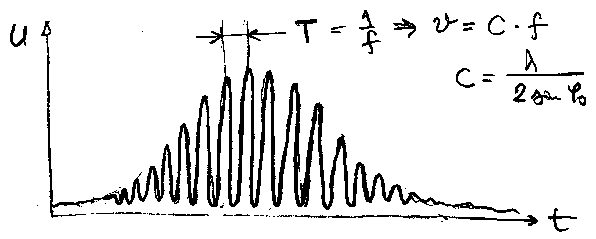
Prilikom prolaska jednog deli\'ca brzinom V kroz mernu zapreminu, na fotomultiplikatoru se dobija izlaz:
T =
1
f
Þ v=c ×f
gde je c = [(l)/(2 ×sinj0)] .
Figure 8.41: Napon na fotomultiplikatoru, kao rezultat prolaska jednog deli\'ca kroz merni elipsoid
(Staviti i skeniranu slika iz TSI postera ... ima je u LDA-Fringes.cdr file-u)
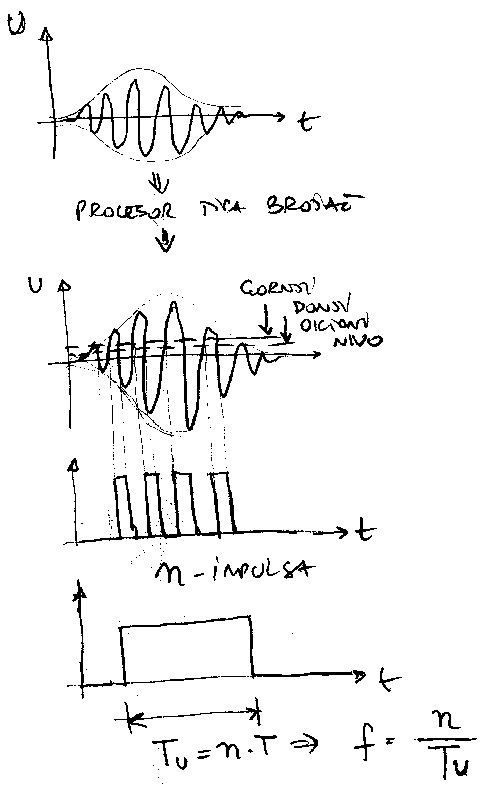
Izlaz se obicno filtrira filterom koji propusta visoke frekvencije, a zatim se obradjuje na jedan od slede\'cih nacina:
analizatorom frekvencije,
procesorom tipa tragaca frekvencije (tracker),
procesorom tipa brojaca,
direktnim semplovanjem i naknadnom obradom signala.
Figure 8.42: Obrada signala brojanjem impulsa koje emituje jedan deli\'c
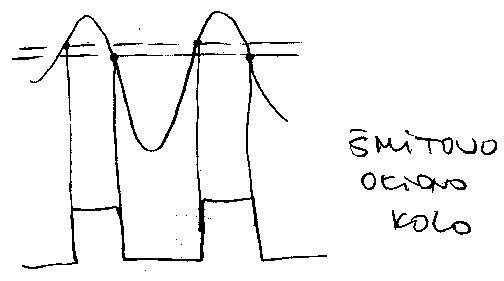
Figure 8.43: Pomo\'cu Smitovog okidnog kola se odredjuje trenutak prolaska signala kroz zadati naponski nivo
Kod analizatora frekvencije, pomo\'cu Smitovog okidnog kola se prvo nepravilan signal sa fotomultiplikatora uoblici u pravilne cetvrtke, a zatim se meri broj impulsa i njihova ukupna perioda:
TU = n ×T Þ f=
n
TU
gde je n broj impulsa u jednom "paketu" poznato i zavisi od l i j0 .
Cesto se koriste brojaci i tragaci frekvencije ("frequency tracker"), ciji je rad prikazan na slici 8.44.
Figure 8.44: Procesor tipa "tragac frekvencije" pokusava da se "zakljuca" na frekvenciju koju emituje deli\'c prolaskom kroz merni elipsoid
(Opisati princip rada - obratiti paznju na detalj da se koristi princip nelinearnog mesanja frekvencija f i f0 tako da se pored proizvoda (f×f0) dobijaju i razlike (f-f0) i zbirovi frekvencija (f+f0). Pogledati malo i Cedin dopunski materijal o LDA, strana 10).
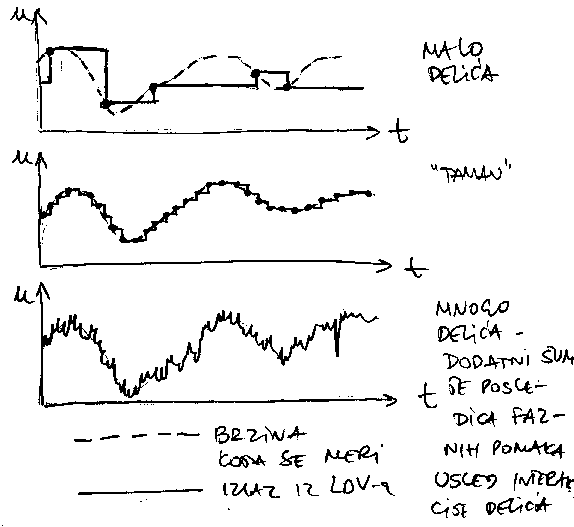
Da bi LDA radio, mora postojati dovoljan broj deli\'ca koji reflektuju svetlost. U vodi ih ima previse za "forward", a malo ili dovoljno za "backward". U vazduhu se moraju dodavati cestice. Idealno bi bilo kad bi u jednom trenutku unutar merne zapremine bio samo jedan deli\'c.
Figure 8.45: Za korektan rad LDA sistema, potrebno je imati optimalan broj deli\'ca po jedinici zapremine fluida (srednji dijagram izlaznog napona), ne valja ni premalo (gornji dijagram) ni previse (donji dijagram)
Na slici 8.45 su prikazani signali koji se dobijaju sa fotomultiplikatora u slucaju kada ima malo deli\'ca u mernoj zapremini, dovoljno i previse. Na zadnjoj slici se vidi i fazni pomak usled interakcije deli\'ca ... (Slika iz Introduction to laser doppler anemometry, Zürich, B3-4).
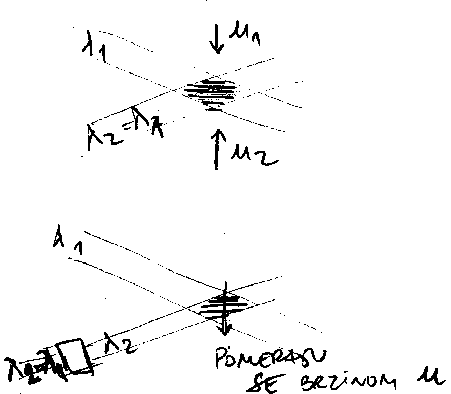
Ako su talasne duzine oba zraka iste - tamne i svetle linije u mernoj zapremini miruju. Brzine u1 i u2 daju isti izlazni signal. Ako se l2 za malo promeni pomo\'cu Bragg-ove \'celije, u preseku se dobijaju linije koje se polako pomeraju brzinom u .
Figure 8.46: Ako su laserski zraci koji se presecaju istih talasnih duzina, svetle i tamne pruge unutar mernog elipsoida miruju (gornja slika) pa nije mogu\'ce odrediti smer brzine fluida; ako se talasne duzine razlikuju, tamne i svetle pruge se pomeraju konstanom brzinom pa je mogu\'ce meriti brzine fluida u oba smera
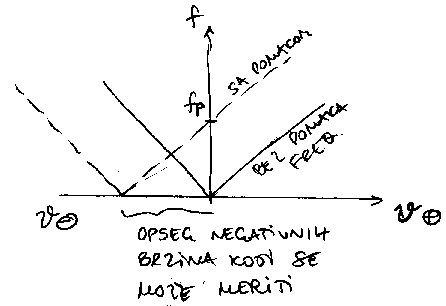
Sada je izlazni signal u1 + u za pozitivne brzine u1 i (-u2) + u za negativne brzine, pa je mogu\'ce meriti negativne brzine u opsegu od 0 do -u. Merna brzina u ovom slucaju je:
u1 = ( f - fP) ×Dx
gde je fP frekvencija pomeranja (obicno 40 KHz).
Figure 8.47: Opseg negativnih brizna koje se mogu meriti zavisi od frekventnog pomaka fP jednog od lasera
LDA sa dva zraka meri samo komponentu brzine u ravni koju cine zraci. Da bi se dobila druga komponenta, treba okrenuti zrake lasera, ili koristiti slozene 2D i 3D sisteme.
Figure 8.48: Kombinacijom dve vrste lasera, sa razlicitim talasnim duzinama, mogu\'ce je meriti dve komponente brzine fluida
(Slika iz TSI reklame velike + Pogledaj sliku iz B4-4, Zürich).
Opste karakteristike LDA:
Pozitivne:
apsolutno merenje,
ne remeti tok,
mala merna zapremina,
1D, 2D i 3D,
vazduh, voda,
meri i visoke intenzitete turbulencije.
Negativne:
skupo i komplikovano,
problemi sa deli\'cima - ni malo, ni mnogo, ni veliki, ni mali,
komplikovana obrada - potrebno je dosta znanja da se sistem pusti u rad,
savremeni fiber-opticki sistemi su zgodni ali remete tok,
ne snimaju celo polje brzina istovremeno, ve\'c samo u jednoj tacki.
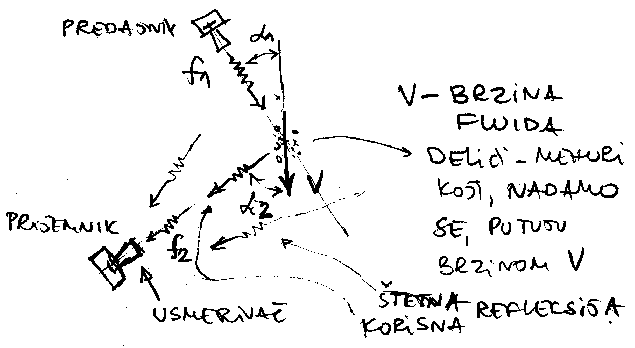
Ultrazvucni dopler anemometar
UZV dopler anemometar koristi refleksiju zvuka od deli\'ca koji se kre\'cu zajedno fluidom i koji prave doplerov pomak frekvencije zvuka.
Figure 8.49: Merenjem frekventnog pomaka reflektovanog ultrazvuka od deli\'ca koji se kre\'cu zajedno sa fluidom, mogu\'ce je odrediti brzinu tih deli\'ca, pa i fluida
Kada se deli\'ci kre\'cu u pravcu prijemne sonde, generise se visa frekvencija (f2) nego emitovana frekvencija (f1):
f2 = f1 ×
æ è
1 +
V
c
×cosa2 -
V
c
×cosa1
ö ø
pa je brzina deli\'ca:
V = c ×
f2 - f1
f1 ×( cosa2 + cosa1 )
Primer vrednosti: za brzinu deli\'ca od V = 1 m/s, brzinu putovanja ultrazvuka kroz vodu c = 1500 m/s i uglove a1 = 00 i a2 = 450, osnovna frekvenzija zvuka koji se emituje f1 = 1 MHz se pomera za pomak od Df = -195 Hz na frekvenciju f2=0.999805 MHz.
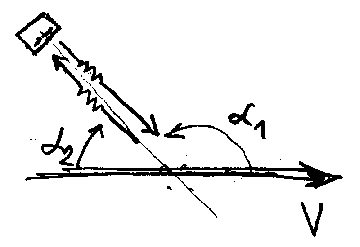
Najces\'ce se prijemnik i predajnik postavljaju u isti nosac, pa je tada veza izmedju uglova a1 = a2 + 1800. Reflektovana frekvencija f2 je:
f2 = f1 ×
æ è
1 ±
2V ×cosa
c
ö ø
(+ se koristi za smer brzine V ka sondi, a - za smer kao na slici), a brzina deli\'ca:
V = c ×
f2 - f1
2f1 ×cosa
(Nadji iz kataloga neku sliku - Ima kod Cede u knjizi slika 57 - (losi su dijagrami) - Imam folije od Ott-a (otvoreni tokovi) - Ponoviti kod price o protoku u otvorenim kanalima)
Figure 8.50: Zbog jednostavnije montavze, najces\'ce ista UZV glava radi i kao predajnik i kao prijemnik
Problem je sto brzina V zavisi od c - brzine zvuka u fluidu, a brzina zvuka je funkcija ugla a (konstrukcijom usmerivaca se poboljsava tacnost) ali i gustine fluida r, koja nije konstantna kroz vreme i zavisi od temperature.
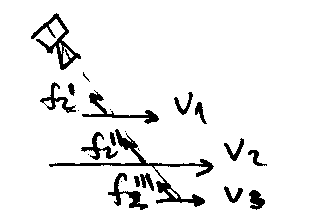
Konstruktivno, koriste se dva nacina rada UZV pretvaraca:
Kontinualni - predajnik kontinualno salje f1 , a prijemnik slusa f2 . Problem je sto se ne zna koji deli\'ci su vratili f2 , a cesto dolazi i do interferencije izmedju deli\'ca, pa se dobijaju frekvencije f2¢, f2" i f2"¢, pa je tesko merenje. KLIKNI za sliku jedne sonde
Figure 8.51: Kada UZV glava primi reflektovani zvuk, ona ne moze razluciti koji je od deli\'ca vratio taj zvuk
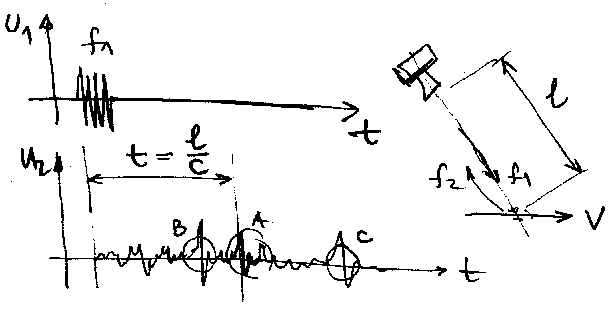
Impulsni nacin - predajnik posalje kratak impuls frekvencije f1 , a prijemnik slusa samo u odredjenom trenutku.
Figure 8.52: Impulsni rezim rada: UZV u kratkom "paketu" posalje ultrazvuk, pa se onda prebaci na prijemni rezim i "osluskuje" povratni zvuk
UZV dopler spada u apsolutna merenja - nije potreba kalibracija - ali i u merenja niske tacnosti - tipicno 5 - 10 %, uglavnom zbog nepoznavanja tacne gustine fluida. Problem je sto dobru refleksiju daju samo ve\'ci mehuri\'ci i deli\'ci u vodi, a oni ne prate dobro kretanje vode, pogotovu ako postoji visi intenzitet turbulencije.
UZV dopler se uglavnom koristi tamo gde treba indikacija brzine ili u uslovima gde bi druga merenja bila komplikovana (u medicini, protok u krvnim sudovima).
Posto pomak frekvencije zavisi od cosa, mogu\'ce je i 2D i 3D merenje
(Nadji clanak o ovome!!!). Izuzetno je komplikovano, koristi se uglavnom u istrazivacke svrhe gde LDA ne moze da se primeni.
Skuplja verzija impulsnog UZV uredjaja \'ce prepoznati sve pakete povratnog signala, i na\'ci njihove brzine i lokacije. Takvi uredjaji se nazivaju ADCP - Acoustic Dopler Current Profiler i veoma su popularni u poslednje vreme. Ultrazvucni signal koji se reflektuje od deli\'ca se digitalizuje brzim AD konverterom. Pomo\'cu DSP-a (Digital Signal Processor) se u realnom vremenu analiziraju podaci u digitalnom signalu i racunaju brzine na razlicitim dubinama.
Figure 8.54: ADCP uredjaji mere brzine u vise tacaka duz jednog pravca - slika iz Hydrometri, W. Boiten
Figure 8.55: Merni opseg ADCP uredjaja - slika iz Hydrometri, W. Boiten
Za fiksnu montazu se obicno koristi 2D sistem, koji meri brzine u jednoj ravni.
Figure 8.56: Horizontalni ADCP uredjaj (meri 2D brzine u horizontalnoj ravni i dubinu vode)- Firme SonTek
Prikazani 2D ADCP uredjaj moze da daje kontinualno protok rekom, ali se po pravilu daju i detaljniji podaci - kompletan profil brzina: KLIKNI za ChannelMaster ADCP
Jedna od interesantnih mogu\'cnosti primene ADCP-a u rekama (sa fiksnom montazom) je u koris\'cenju cak i reflektovanog signala od brodova (markira se kao los signal). Njegovom obradom se moze dobiti informacija o broju i brzini plovila koja prodju kroz kontrolni presek.
KLIKNI za Aqua Vision-ov primer aplikacije (www.aquavision.nl)
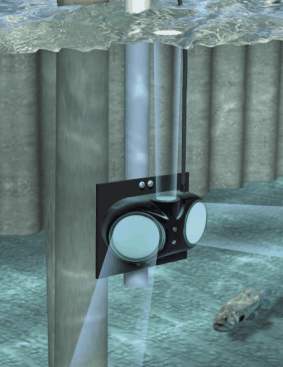
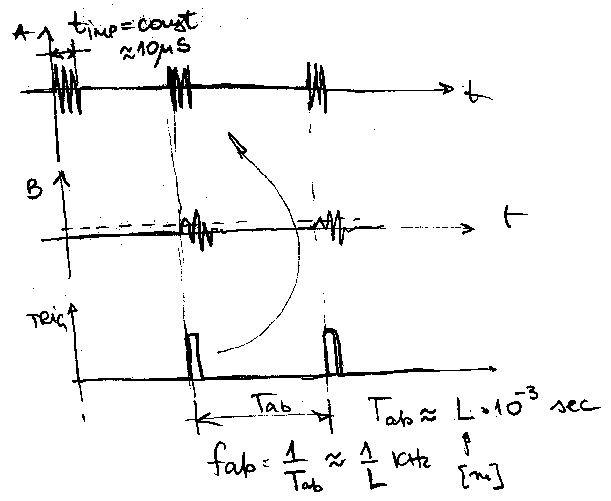
Nesto drugaciji princip rada ultrazvucnih senzora je ultrazvucni kros-korelacioni. Senzor emituje kratak ultrazvucni impuls, a zatim se snima (memorise) odjek koji je stigao od svih delica koje nosi voda. Zatim se posle kra\'ceg vremenskog intervala posalje novi signal, od koga se takodje snimi odjek.
Figure 8.57: Princip rada kros-korelacionog ultrazvucnog senzora za brzine
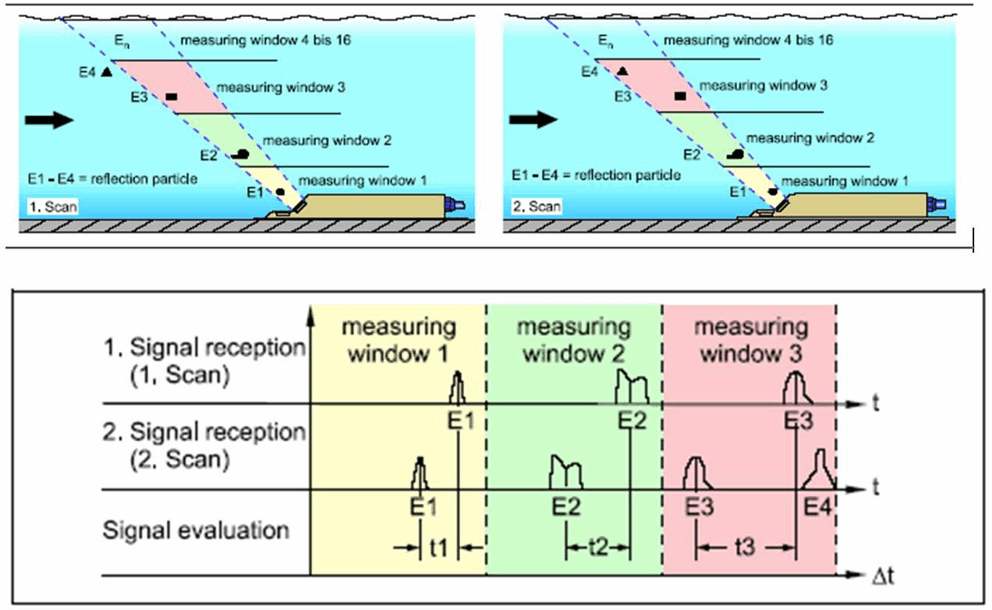
Primljeni prvi i drugi signal se prvo izdele na segmente, cime se formiraju "prozori" u okviru kojih se meri brzina (odnosno, slojevi vode po dubini). Za svaki prozor se proverava korelacijom da li su prvi i drugi odjek stigli od istog deli\'ca (na slici 8.57, deli\'ci E1, E2 i E3 u prozorima 1, 2 i 3) ili je odjek stigao od deli\'ca koji je u medjuvremenu napustio merni prozor ili se pojavio sa strane (na slici 8.57, deli\'c E4 u prozoru 3). Sva analiza se obavlja pomo\'cu ugradenog DSP procesora.
Za deli\'ce koji imaju visok stepen korelacije, racuna se iz korelacionog dijagrama vreme "pozurivanja" deli\'ca (na slici t1, t2 i t3): prilikom drugog emitovanja ultrazvucnog impulsa, deli\'ci su se pomerili za rastojanje DX pa su sada blizi sondi, pa je i vreme putovanja odbijenog zvuka kra\'ce.
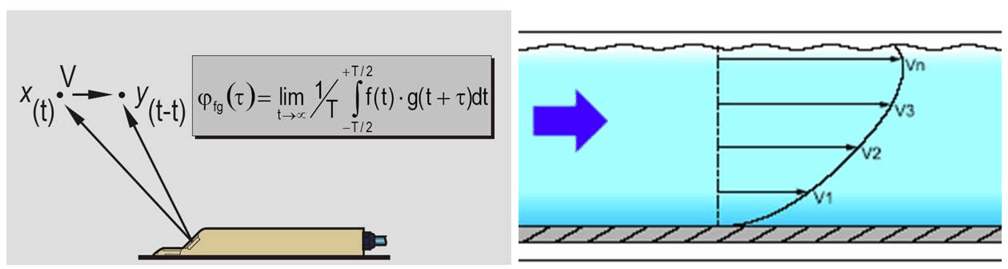
Figure 8.58: Kros-korelacijom se dobijaju brzine u razlicitim slojevima vode
Znaju\'ci geometriju sonde (ugao pod kojim se emituje ultrazvucni impuls) i brzinu propagacije zvuka u vodi (meri se temperatura vode pa se automatski kompezuje brzina propagacije), iz izracunatog vremena se dobija brzina deli\'ca koji su bili u odredjenom prozoru.
Ceo proces se ponavlja oko 2000 puta u sekundi. Ugradjeni procesor u proracun uzima samo deli\'ce koji imaju visoki stepen korelacije, tako da se dobija pouzdano merenje brzine.
KLIKNI za sliku NIVUS kros-korelacionog UZV senzora
Bez obzira da li se meri pomo\'cu mehanickih ili drugih pretvaraca, uvek se dobija izlaz koji je jednak srednjoj vrednosti pojedinih brzina duz merne linije, pomnozenih sa tezinskim koeficijentima (najces\'ce = 1). Tako dobijena brzina nije isto sto i srednja profilska brzina, definisana kao:
V =
Q
A
gde je Q protok, a A proticajni profil.
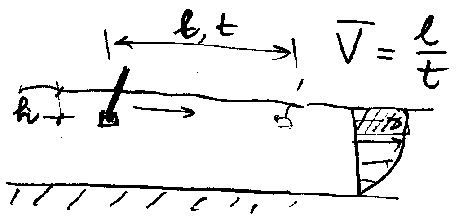
Najjednostavniji nacin je merenje u reci gde se ubaci plovak, stap ili sl. i meri predjeni put u vremenu:
V
=
l
t
Figure 8.59: Merenje prosecne povrsinske brzine nije tesko izvesti - potreban je plovak i stoperica
(Ovo je toliko prosto, da su cak i studenti radili na prvoj vezbi KLIKNI za sliku).
Tu je [`(V)] srednja vrednost brzine duz izmerenog puta - ali ne samo povrsinske brzine ve\'c srednje vrednosti brzina duz visine potopljenog dela stapa h.
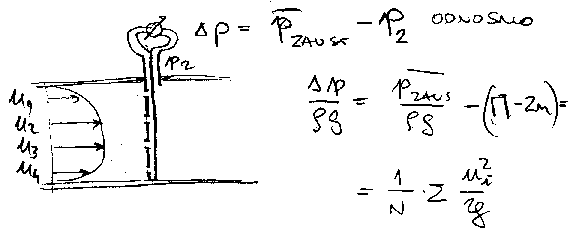
Anubar
Pitoova cev meri brzinu u jednoj tacki. Ako bi se stavilo vise Pitoovih cevi po dubini, mogla bi se meriti srednja brzina.
Figure 8.60: Anubar meri prosecni zaustavni pritisak
Figure 8.61: Anubar meri prosecni zaustavni pritisak
Dp =
pzaus
- p2
Dp
rg
=
pzaus
rg
- (P- zM ) =
1
N
×
å
ui2
2g
Problem je sto anubar meri srednji zaustavni pritisak, odnosno srednju vrednost brzinske visine [(ui2)/(2g)], pa je
V
= C1 ×
æ Ö
2
r
×
Ö
Dp
gde C1 zavisi od rasporeda brzina u profilu. Dobija se kalibracijom u stvarnim uslovima.
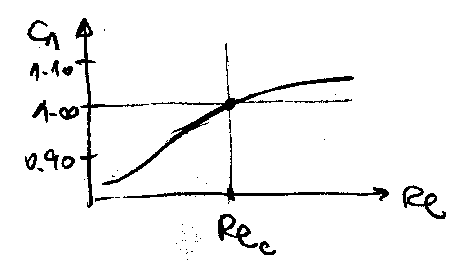
Da bi se anubar iskoristio za merenje profilske brzine u cevi, za pretpostavljeni eksponencijalni (ili logaritamski) raspored brzina pri jednom Rec broju, napravi se takav izbor rupica da je C1 = 1 . Za druge Re mora se koristiti korekcija (Pronadji proizvodjacki dijagram negde):
Figure 8.62: Zavisnost pokazivanja anubara od Reynolds-ovog broja - tipski dijagram - za svaki pojedini oblik anubara treba imati odgovaraju\'ci dihjagram
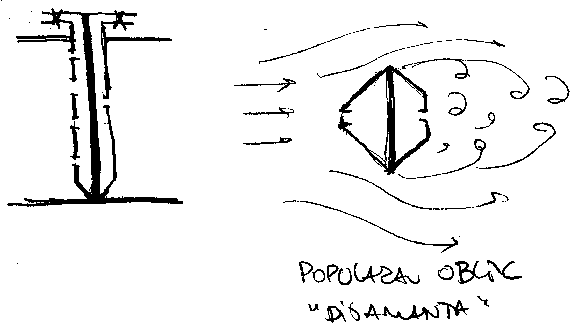
Konstruktivno, referentni pritisak p2 se obicno meri u vrtloznoj zoni iza sonde, pa je p2 < rg (P- z) . Razliciti proizvodjaci cesto patentiraju specificne poprecne preseke anubara.
Figure 8.63: "Diamand shape" je prlicno popularan oblik anubara, obezbedjuje stabilnu tacku odvajanja vrtloga na bokovima i samim timn stabilan nizvodni pritisak koji je manji od statickog pritiska
Anubar se cesto koristi za merenje protoka gasova u uslovima visokih temperatura i pritisaka. U vodovodima se retko sre\'ce.
Kod provodnih tecnosti, srednja vrednost brzine [`(V)] izmedju dve tacke se moze meriti elektromagnetnim induktivnim pretvaracima.
Figure 8.64: Kad bi bilo mogu\'ce napraviti potpuno homogeno magnetno polje izmedju tacaka A i B, tada bi induktivni pretvarac merio srednju brzinu duz linije AB
eA-B =
ó õ
L
®
B
×
®
u
dl
gde je eA-B = [`(V)] ako je polje [(B)\vec] homogeno i upravno na pravac L. Elektromagnetna sonda, opisana u delu 8.3.2 takodje meri srednju brzinu izmedju dve elektrode, samo sto su one jako blizu.
Merila sa pravim homogenim poljem se mogu prakticno realizovati samo u okviru relativno malih duzina L, maksimalno do 200 - 500 mm i to samo kod merenja u cevima. Standardno se prave i merila sa nehomogenim poljem, kako za tecenje u cevima tako i za tecenje u otvorenim tokovima. Kod takvih merila integral proizvoda magnetnog polja i polja brzina duz linije L ne daje srednju brzinu [`(V)], ve\'c neku drugu, koju klaibracijom treba povezati sa srednjom profilskom brzinom.
Ako se elektromagnetno merilo sa homogenim poljem koristi za merenje protoka u cevima, problem je sto srednja brzina duz linije nije jednaka srednjoj profilskoj brzini [`(V)] ¹ V , odnosno sto u smislu protoka u kruznoj cevi nije isti doprinos brzine u1 i u2 - u1 se mnozi sa A1 >> A2 , tako da je:
V = C ×
V
gde C zavisi od Re i precnika.
Figure 8.65: Homogeni induktivni davaci mogu da se naprave u cevima manjih precnika - oni \'ce stvarno meriti srednju brzinu duz precnika, ali to nije isto sto i srednja profilska brzina!
(Kod dela o protoku, dati dijagram rasporeda brzine puta dijagram rasporeda povrsine po precniku òAuda=ò0Rur 2rpdr = [`(V)]ò0R 2rpdr, gde je 2rpdr = dA
Figure 8.66: Brzine po precniku treba mnoziti sa pripadaju\'cim kruznim prstenovima da bi se dobio protok
Razmotri da li ovde da se prica o merilima sa nehomogenim poljem - mozda u poglavlju o merenju u cevi, gde se tezi nehomogenim poljem korigovati dijagram raspodele povrsine.)
Ultrazvucna merila
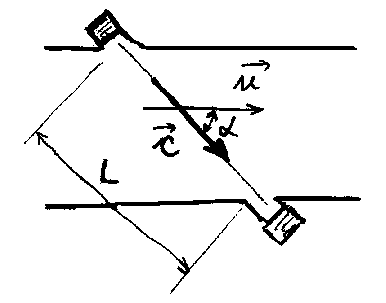
Merenje srednje brzine fluida duz jedne linije je mogu\'ce posti\'ci merenjem vremena prostiranja zvuka. Rad pretvaraca se bazira na vektorskom sabiranju brzine zvuka [(c)\vec] i brzine fluida [(u)\vec] .
Figure 8.67: Brzina putovanja ultrazvuka kroz fluid se vektorski sabira sa brzinom fluida
Stvarna brzina zvuka kroz fluid koji se kre\'ce brzinom u je:
c¢ = c +
1
L
ó õ
L
0
u ( l ) ×cosadl
c¢ = c +
V
×cosa
odnosno srednja brzina izmedju dve ultrazvucne (UZV) glave (jedna je predajnik a druga prijemnik):
V
=
c¢-c
cosa
=
L
T¢
-
L
T
cosa
= c ×
DT
T¢
×
1
cosa
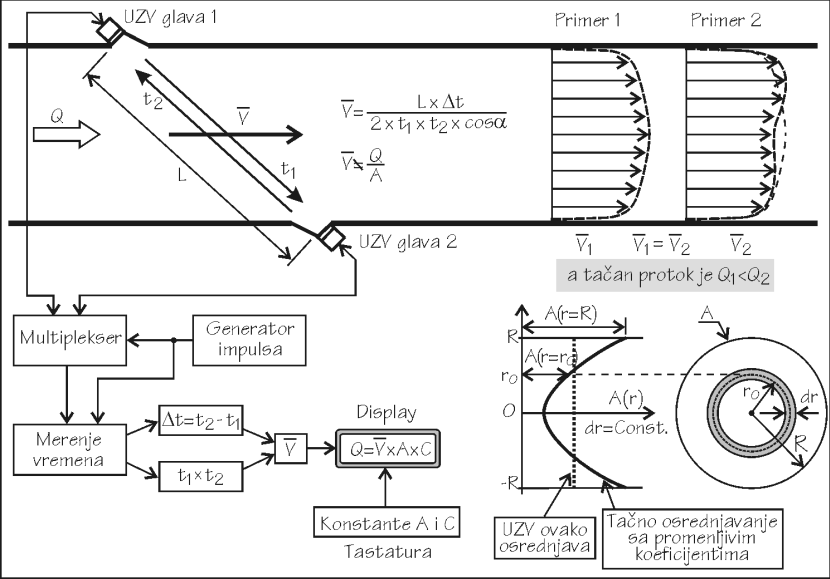
pri cemu se ne sme zaboraviti da je srednja brzina duz linije L razlicita od srednje profilske brzine V, odnosno [`(V)] ¹ V=[(Q)/(A)].
Srednja brzina zavisi od c, brzine zvuka u fluidu, pri cemu c zavisi od temperature fluida, pritiska, gustine i koncentracije mehuri\'ca. (Za knjigu detaljnije dati iz A6-2: Acoustic discharge measuring devices, J.G.Drenthen, Zürich).
Da bi se izbegla zavisnost merene brzine [`(V)] od brzine zvuka, u praksi se koristi sistem koji meri razliku brzina c¢ izmedju uzvodnog i nizvodnog smera ultrazvuka:
Figure 8.68: Merenjem brzine putovanja ultrazvuka u dva suprotna smera, eliminise se uticaj brzine prostiranja zvuka kroz fluid na merni rezultat
posto je V2 << c2 , moze se zanemariti clan [`(V)]2 cos2 a pa se dobija:
Dt =
2 ×L ×
V
×cosa
c2
Relativno je jednostavno napraviti elektronsko kolo da meri direktno samo Dt , ali i dalje ostaje uticaj brzine c na rezultat. Da bi se to izbeglo treba meriti i proizvod t1 ×t2 :
t1 ×t2 =
L
c+
V
cosa
×
L
c-
V
cosa
=
L2
c2 -
V
2
cos2a
t1 ×t2 =
L2
c2
(gubi se iz izraza srednja brzina [`(V)] !). Ako se iz poslednjeg izraza izvuce c2
c2 =
L2
t1 ×t2
i zameni u Dt jednacinu, dobija se izraz koji je oslobodjen brzine propagacije ultrazvuka kroz fluid:
Dt =
2L
V
cosa
L2
t1 ×t2
Þ
Dt
t1 ×t2
=
2 ×
V
×cosa
L
odakle se dobija srednja brzina [`(V)] kao:
V
=
L ×Dt
2 ×t1 ×t2 ×cosa
Iz dobijenog izraza za srednju brzinu fluida, vidi se da je u pitanju apsolutno merilo: merena brzina zavisi samo od merenja vremena i predjenog puta!
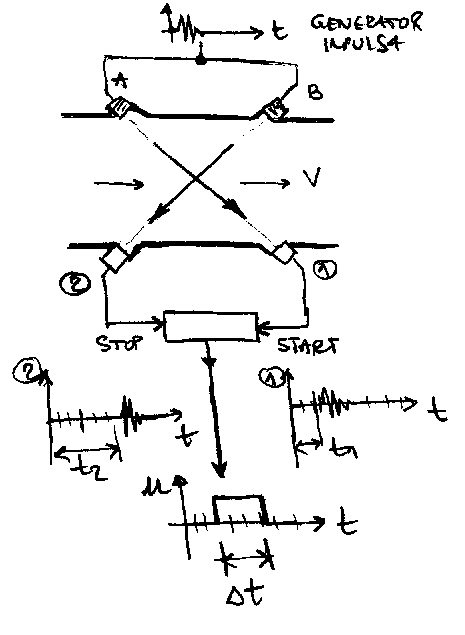
Prakticna realizacija je obicno sa jednim parom UZV sondi, kada u jednom trenutku jedna sonda salje impuls a druga slusa, a u slede\'cem trenutku zamene uloge.
Nije jednostavno meriti vremena t1 i t2 : za L = 0.5 m, a = 300 , [`(V)] = 1 m/s i c = 1450 m/s, Dt = 0.412 ms. Za 1 % tacnosti, treba meriti vreme t od 4 ns, odnosno f = 250 MHz. Vremena t1 i t2 su: t1 = 344.622 ms i t2 = 345.034 ms, pa je rezolucija od 0.004 ms vise nego dovoljna.
U praksi se greske merenja tesko ostvaruju sa manjim dt = 10 ns ( = 10 ×10-9 s), pa se iz izraza za [`(V)] , uz zamenu c = [(L)/(t1)] = [(L)/(t2)] moze proceniti uticaj duzine na tacnost merenja.
d
V
»
c2 ×Dt
2 ×L ×cosa
=
0.012
L
[m/s]
odnosno, za L < 1 m, apsolutna neodredjenost brzine je d[`(V)] = 1.2 cm/s.
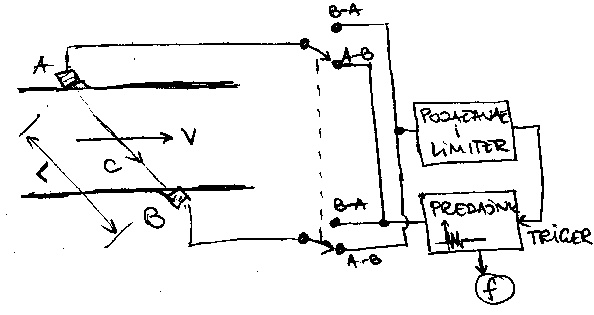
Pored merenja vremena putovanja ultrazvuka direktno, cesto se meri frekvencija kojom sonda emituje i prima signale ( sing around metod ).
Figure 8.70: Princip rada "sing around" metoda, koji je posebno pogodan za kratka rastojanja
Figure 8.71: Vremenski dijagrami kod "sing around" metoda
Sonda A posalje kratak impuls frekvencije 1-5 MHz i konstantnog trajanja timp . Kada impuls stigne do sonde B, generise se triger signal za generator impulsa, koji se opet salje na sondu A i tako u krug n puta:
fab =
1
n
n å
1
1
tab
=
1
n
n å
1
c +
V
cosa
L
Kada se odredi fab , okrenu se uloge sondi A i B, i odredi se:
fba =
1
n
n å
1
1
tba
=
1
n
n å
1
c -
V
cosa
L
pa je brzina [`(V)] :
fab - fba =
c+
V
×cosa
L
-
c-
V
×cosa
L
=
2 ×
V
×cosa
L
V
=
L ×( fab - fba )
2 ×cosa
Ako se zeli ve\'ca tacnost merenja nego kod direktnog merenja vremena, potrebno je meriti u jednom smeru vise sekundi - cesto i par minuta. To zahteva da se ne promeni u periodu merenja ni brzina propagacije zvuka c ni srednja brzina [`(V)]. Metod je pogodniji je za kra\'ca rastojanja, kod kojeg metoda direktnog merenja vremena ima veliku relativnu gresku.
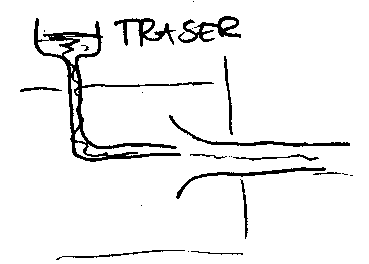
Korelatorska merila
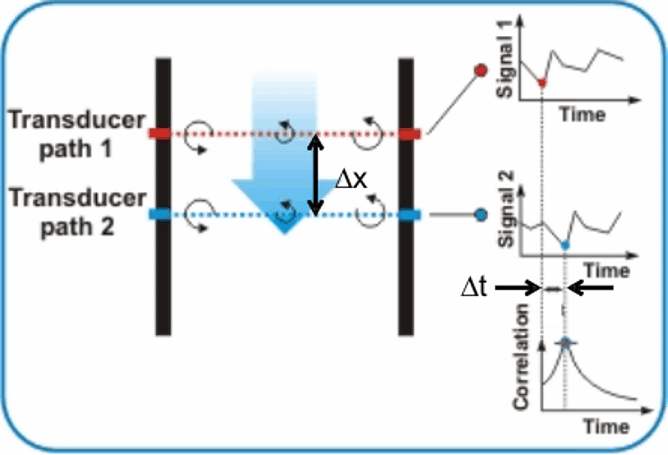
Metoda se bazira na analizi korelacije izmedju signala sa dva merna pretvaraca, postavljena na rastojanju L, gde oba pretvaraca mere istu velicinu. Obicno su to pritisak, temperatura, providnost (transparentnost), elektroprovodnost, ...
Figure 8.72: Korelatorski nacin merenja srednje brzine
(Clanak o UZV Kroskorelacionom merenju - N.W.King, ... - Siva knjiga - Cross correlation flow measurement in oil-air mixtures, 2nd internatiopnal conference on flow measurement, London, 1988 - page 163.)
Na slici je nacrtan akusticni pretvarac: predajnici emituju konstantan signal, a prijemnici "vide" promenljiv signal, u zavisnosti od kolicine materije koja se nalazi izmedju sondi i koja disipira vise ili manje akusticne energije.
Ako se pretpostavi da da u toku postoji paket fluida sa karakteristikama fluida drukcijim od okolnog fluida i da se te karakteristike menjaju kroz vreme znatno sporije nego sto je potrebno vreme prolaska izmedju dva para pretvaraca, kao i da taj paket putuje istom brzinom kao i okolni fluid, tada je mogu\'ce na osnovu kroskorelacije dva signala odrediti vreme putovanja paketa izmedju pretvaraca.
Za uspesan rad merne metode, mora postojati dovoljan broj karakteristicnih "paketa" - cesto se vestackim putem izdvajaju odredjeni poreme\'caji uzvodno da bi se poboljsalo merenje.
Po pravilu, merne velicine se moraju dovoljno brzo uzorkovati - ne mogu se koristiti pretvaraci koji daju osrednjene karakteristike.
Za brzinu [`(V)] = 1 m/s i L = 0.5 m, vreme t = 0.5 sec - da bi se postigla tacnost od 1 %, treba meriti velicine (fluktuacije) sa Dt = 5 msec. Dobra strana metode je sto merni sistem ne mora da bude linearan - bitno je samo da ne unosi vremensko kasnjenje!
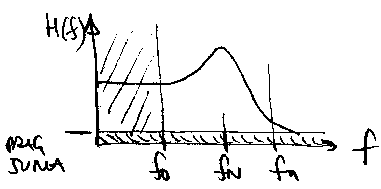
Figure 8.73: Transfer funkcija standardnog mernog sistema: za direktno merenje brzine obicno se kao gornja frekvencija uzima frekvencija f0 dokle je sistem linearan, kod korelacione metode, moze se meriti i u nelineranom delu transfer funkcije, sve dok je signal iznad praga suma
Ako nas interesuje samo merna velicina mogu se meriti fluktuacije do f0 (ili i vise, ali uz komplikovanu kompenzaciju - dekonvoluciju u off-line obradi). Kod kroskorelacije se koriste fluktuacije do f1 - sve dok je korisni signal iznad praga suma, odnosno dok moze da se koristi za dalju obradu.
Pove\'canjem duzine L smanjuje se potreba za brzim merenjem, ali se smanjuje i intenzitet kroskorelacije jer se sa duzim vremenom vise promene i karakteristike "paketa".
Vazno: Kroskorelaciona metoda ne moze da meri brzinu [`(V)] » 0 , tako da mora postojati detekcija za [`(V)] < [`(VKRIT)] , odnosno tmax > tmax,krit . Treba je koristiti samo ako druge metode ne mogu da se koriste, ili ako su u pitanju velike brzine.
Interesantan nacin primene kroskorelacione metode je korisénje zvuka kao merne velicine. Metoda se naziva ASFM - Acoustic Scintillation drift Flow Measurement i prati uticaj turbulentnih vrtloga na prostiranje zvuka poprecno na tok.
Figure 8.74: Princip rada ASFM - Acoustic Scintillation drift Flow Measurement - metode (ASL AQFlow Inc., Kanada - http://www.aqflow.com/)
Snimanjem kompletnog signala koji stigne na prijemnik, i njegovom obradom u DSP-u, mogu\'ce je odrediti brzine po preseku. Postavljanjem tri para predajnika - prijemnika, mogu\'ce je odrediti i 2D polje brzina.
KLIKNI za prezentaciju ASFM metode
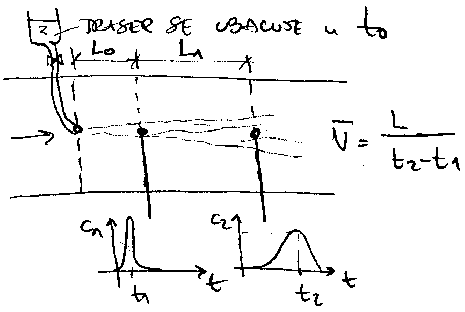
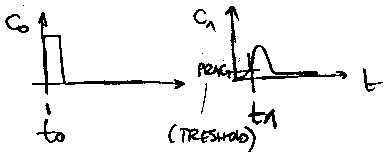
Prethodna, kroskorelaciona, metoda je predvidjena za stalno - kontinualno merenje brzine. Ako se merenje obavlja jednokratno, jednostavnije je koristiti traserske metode - u fluid se ubaci u jednom trenutku traser, pa se nizvodno u dva profila prati promena koncentracije.
Figure 8.75: U traserskoj metodi se meri brzina putovanja injektiranog trasera, bilo izmedju dve merne lokacije, bilo izmedju mesta injektiranja i jedne merne lokacije (prikazano na slici 8.76)
Mogu\'ce varijante:
Na dve lokacije se meri c(t), pa se ocitavaju trenuci maksimuma t1 i t2 i racuna srednja brzina duz linije L1:
V
=
L1
t2 - t1
Na jednoj lokaciji se meri c(t) ali sinhronizovano sa sistemom za ispustanje trasera, a meri se vreme t1 kada pocne da raste koncentracija trasera u nizvodnom preseku.
V
=
L0
t1 - t0
Figure 8.76: Ako je mogu\'ce ostvariti dobru sinhronizaciju merenja koncentracije trasera i injektiranja, dovoljno je samo jedno kontinualno mereno mesto
(Pogledaj kod Slavka Jovanovica - Hidrometrija
Na dalje se daje file skinut sa reklame za Flo-Tracer - direktno merenje protoka na osnovu merenja oblaka koncentracije - VAZNO: ovo verovatno vise ide u deo o merenju protoka u otvorenim tokovima!!!)
http://www.flowline.co.uk/apps/app4.html
FLO-TRACER - Rapid Flow Measurement of Stream and Effluent Flows
The measurement of flows in rivers and streams can be accomplished in a variety of ways. Permanent metering systems can involve the use of ultrasonic or electromagnetic velocity sensors or large gauging structures, which measure the head, or the height of the river through a flume or weir. All of these methods can involve substantial civil work and therefore expense, however for fixed systems this is often acceptable.
Temporary or short-term flow measurement of rivers and streams is usually arrived at, by the use of the area of velocity equation (Q = V x A). With V being average of the velocity of the river at a known area that's A. Velocity is usually measured by carrying out a velocity profile of the river using an electromagnetic velocity centre. The area is calculated by physically measuring the widths and depths of the river or stream, this of course can prevent many problems the most fundamental of which being that rivers and streams by their nature are neither uniform in their shape or velocity profile. Accurate flows therefore require careful and time-consuming exercises.
An alternative method of flow measurement is by the use of tracer-type meters, these meters introduce a tracer material or dye into the river and stream and by the use of a down stream sensor directly measure the volumetric flow rate. Tracer materials can include radioactive fluids or fluorescent dyes, which of course can introduce their own environmental concerns. In order to address these concerns the Swiss Environmental Agency put forward a requirement for an "environmentally friendly" flowmeter to measure their many thousand mountain streams and rivers, the system that was eventually chosen was the Flo-Tracer, which is now available from Flowline Manufacturing.
This system uses common table salt as a tracer material and a portable hand-held unit, which measures the salinity in the stream and calculates and displays the volumetric flowrate. Introducing salt into fresh water streams is quite acceptable. The amounts required are very low and do not affect marine life, indeed vast quantities of salt enter natural streams as a result of rock salt being washed off of roads in winter.
The Flo-Tracer has been used on numerous applications in the UK including measuring the final effluent discharge from Cross Nest Sewage Treatment Works in South London, for this application only 9 Kg of salt were required to measure a flow of 8,000 litres per second. The entire operation took less than ten minutes to carry out after a suitable metering point had been selected. The Flo-Tracer's advanced capabilities even allow the measurement of raw sewage flows to be made.
Other recent uses have included the verification of fixed flume and weir installations in small treatment works where flows of around 10 litres per second were measured with the use of less than 100 grams of salt. The Flo-Tracer is totally portable requires no special training to operate and comes complete with software, which allows flow data to be downloaded, stored and analysed.
Ve\'c je receno u uvodu dela o merenju brzina, da je brzina vektor koji se menja u prostoru i vremenu:
®
u
=
®
u
( x, y, z, t )
Za proucavanje bilo kog fenomena u fluidu, trebalo bi poznavati celokupno polje brzina u svakom trenutku.
Sistemi koji mere brzinu u tacki se obicno koriste sa sistemima za pomeranje u prostoru - da bi se snimilo polje brzina, ali to moze da se primeni samo kod ustaljenih ergodicnih procesa.
Za istrazivanje polja brzine, najces\'ce se koriste razliciti metodi vizuelizacije toka, bilo kvalitativno (relativne brzine) ili kvantitativno. U poslednje vreme je popularna metoda vizuelnog pra\'cenja deli\'ca u fluidu i odredjivanje njihovih brzina. Particle Tracking Velocimetry (PTV) i Particle Image Velocimetry (PIV).
Vizuelizacija toka
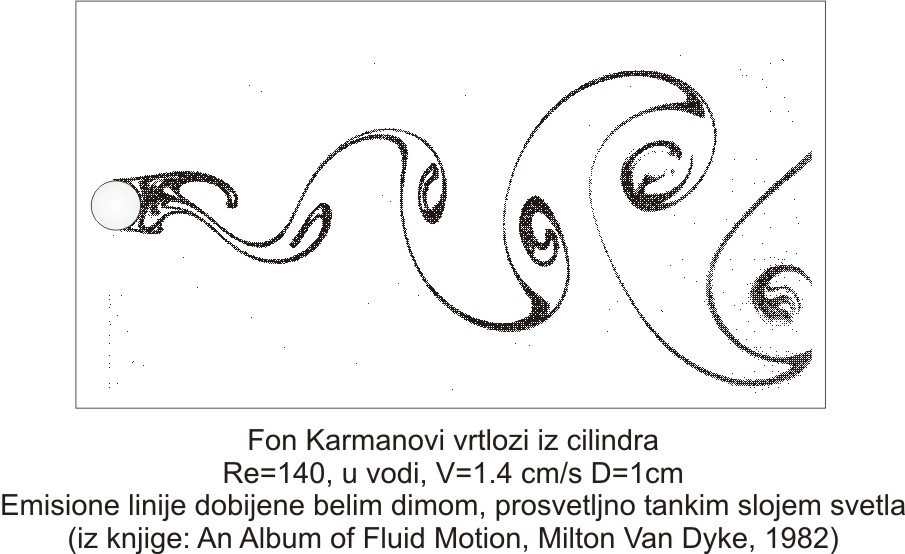
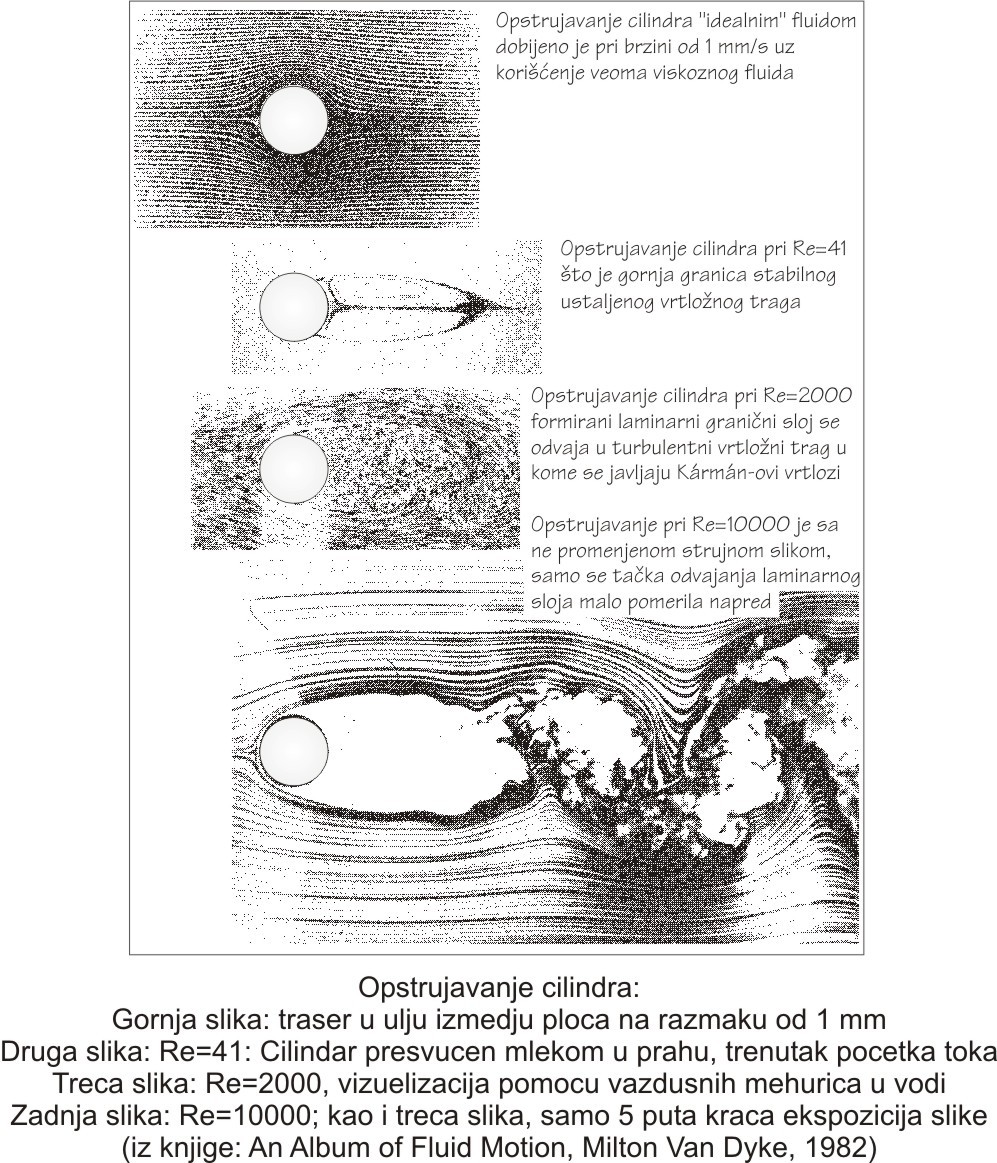
Omogu\'cava naucnicima da vide strujnice i emisione linije. Medju prvima je bio Reynolds sa svojim eksperimentom kojim je pokazao fenomen razvoja turbulencije.
Figure 8.77: Reynolds-ov eksperiment: vizuelizacijom je pokazao postojanje laminarnog i turbulentnog rezima tecenja Stavi pravu sliku
Tehnike vizuelizacije se mogu klasifikovati na slede\'ci nacin (Za svaku od metoda vizelizacije dati primer iz "Introduction to fluid mechanics", Nakayama.):
Vizuelizacija brzina uza zid (wall-tracing methods)
Clanak C1-1 W. Merzkirch: Methods of flow visualization, Zürich
Materijal iz Ciriha gde sam bio na Flow visualization - W. Merzkirch
Introduction to fluid mechanics, Nakayama, chapter 16
Naci rad Ronald J. Adrian (1991) Particle imaging techniques for experimental fluid mechanics, ann.rev. fluid mechanics 23, 261-304
Analiza slika vizuelizacije (PTV i PIV)
Slike dobijene vizuelizacijom se mogu i kvantitativno obraditi - ako se uoce pojedini deli\'ci fluida na slici (ili nekog trasera) i ako se kroz vreme mogu pratiti polozaji tih deli\'ca, dobija se trajektorija deli\'ca (PTV - prati se kretanje jednog deli\'ca) ili slika strujnica (PIV - prate se svi pokreti deli\'ca za jedan vremenski korak).
Kod PIV tehnike, uglavnom se radi o 2D strujnoj slici. Da bi se obezbedila kvalitetna slika strujnog polja, potrebno je "prosvetliti" sto tanji "sloj" fluida - obicno se to radi pomo\'cu lasera.
Figure 8.78: Eksperimentalna instalacija za dobijanje PIV slika (prema L.M. Lourango and A. Krothapalli, Laser Velocimetry - III, Ladoan, Lison, 1988, pp 161-77)
Serija slika dobijenih vizuelizacijom se pomo\'cu kamere/skenera prenese na racunar, ili se rucno digitalizuje. Obrada je komplikovana:
Prepoznavanje deli\'ca na slikama
Racunanje koordinata (2D ili 3D)
Racunanje mogu\'ceg puta, gde je deli\'c mogao da ode.
U poslednje vreme se dosta koristi "Large scale particle image velocimetry", sistem gde se video kamerom snimaju povrsinske brzine trasera (cesto su to sami talasi) a kasnijom obradom se dobija prostorni raspored brzina.
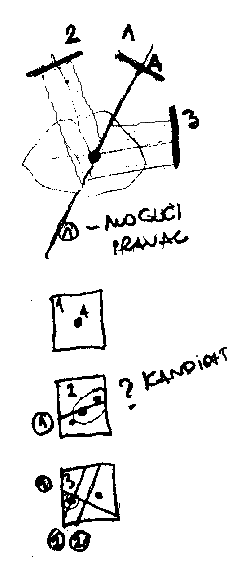
Kod PTV (Particle Tracking Velocimetry) sistema, mogu\'ce je pratiti kretanje deli\'ca u sve tri dimenzije. Tada se ne prosvetljava laserom samo jedna ravan, ve\'c se homogeno osvetljava ceo prostor. Sa minimum dve kamere (ces\'ce 3 ili 4 kamere) se prati kretanje deli\'ca i obradom snimaka se dobijaju trajektorije i strujnice.
Figure 8.79: Kako se odredjuje 3D polozaj deli\'ca na slikama Ocajna slika - mora da se sredi!
Kod obrade snimaka i PIV i PTV veliki problem predstavljaju deli\'ci koji "niodkuda" dolaze ili "iscezavaju" sa snimka - bilo da odlaze u drugu ravan (kod PIV) ili odlaze iz vidnog polja kamere (kod PTV).
Figure 8.80: Kako da znamo koji deli\'c treba da se prati na narednoj fotografiji? Neki su se pojavili niotkuda, drugi imaju vise mogu\'cih pravaca kretanja, itd.
Da bi se pove\'cala verovatno\'ca pronalazenja i pra\'cenja deli\'ca, koristi se veza numerickog modela strujanja u datoj geometriji. Model se "kalibrise" na osnovu prethodna dva vremenska koraka, pa se u narednom koraku pomo\'cu modela pretpostavlja gde su otisli deli\'ci i tamo se na slici traze.
Na predavanjima koris\'cene folije!
Za knjigu jos pogledati za PIV: Hans G. Maas: PTV in 3D Turbulent flow, Zürich course 1992, paper 6 anmd 7 takodje i clanak: Experimental study on the coherent structure of turbulent open-channel flow using visualization and picture processing, Tadashi Utami and Tetsuo Ueno, J.Fluid Mechanics (1987) Volume 174, pages 399-440
Vizualizacija ili vizuelizacija? Particle image velocimetry (PIV)
Clanci: [18] - kako se slikaju deli\'ci i od slike prave koordinate i [21] kako se od koordinata na slici dobijaju putanje deli\'ca.
Referenca na [39], kao i [23] (odlican tekst) i [22] kra\'ca verzija prethodnog!
Apsolutna merenja brzine su pomo\'cu lasera (LDA) i ultrazvuka (UZV) kao i traserska i korelaciona merenja, pa ti pretvaraci ne moraju da se kalibrisu. Ostali pretvaraci (krilo, pito sonda, anubar, hot film, ... ) se moraju kalibrisati. Kalibracija podrazumeva zadavanje poznate brzine i uporedjenje pokazivanja merila sa zadatom brzinom.
Nacini za zadavanje poznate brzine:
kanal sa kolicima
isticanje kroz kruzni otvor
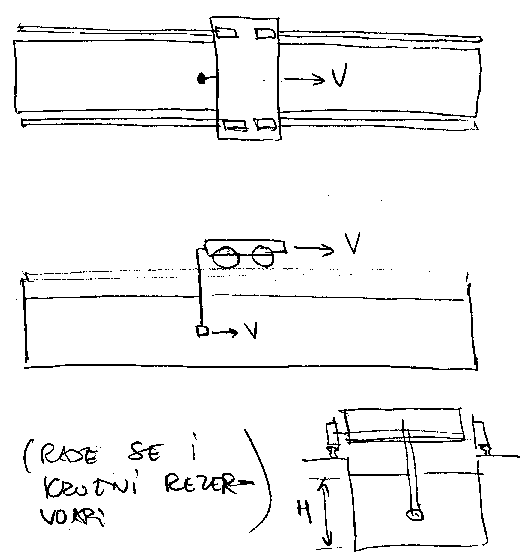
Kanal sa kolicima
Dugacak, dubok i sirok kanal, iznad kanala sine i kolica na kojima se montira pretvarac i elektronika.
Figure 8.81: Kanal sa kolicima koja se kre\'cu po sinama zadatom brzinom
Kroz vodu koja miruje, provlaci se pretvarac (obicno krilo ili EM sonda) brzinom V, pri cemu V ¹ Ö{gH} (brzina kad se javljaju stoje\'ci talasi).
Dva mogu\'ca rezima rada:
trudi se da se u jednoj duzini kanala odrzava konstantna brzina V i tada se ocitava merni pretvarac - potrebna dobra regulacija brzine.
Brzina se odrzava priblizno konstantnom na deonici duzine L, a kontinualno se integrali pokazivanje mernog pretvaraca:
ó õ
T
0
U(t) dt = L ×K
gde je U napon, a K konstanta. Pretpostavlja se linearna veza izmedju napona U i merene brzine V.
Problemi u kalibraciji:
brzina u rezervoaru mora biti 0, tj. voda u rezervoaru mora biti potpuno mirna,
sistem mora biti krut - pretvarac ne sme bocno oscilovati
sine i amortizeri moraju spreciti vertikalne oscilacije
za duge kanale ( > 100 m) sine se moraju korigovati prema zakrivljenosti zemlje
uticaj bokova i dna nije zanemarljiv
(Pronadji stari rad o kolicima - moze i kruzno jezero!)
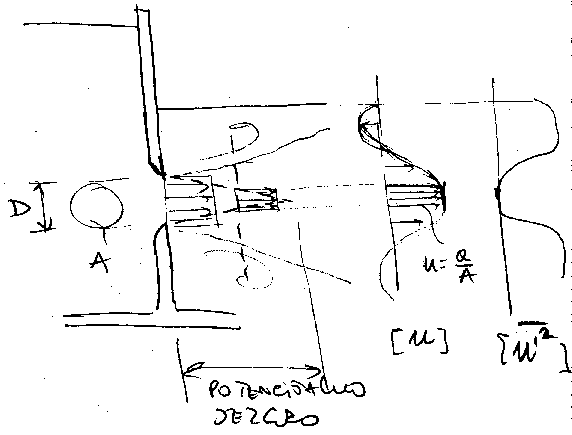
Potencijalno jezgro
Za kalibraciju hot film i pito sondi koristi se sistem sa isticanjem kroz kruzni zaobljeni otvor:
Figure 8.82: Potencijalno jezgro se koristi za kalibraciju malih sondi: brzina je poznata V=Q/A a nivo turbulencije jako mali
Na odredjenoj duzini (3 do 5 D) se formira polje konstantne brzine u = [(Q)/(A)] u kome je intenzitet turbulencije [`(u2)] » 0 . U osovini potencijalnog jezgra su dobri uslovi za kalibraciju pretvaraca.
Figure 8.83: Kalibracija malih hidrometrijskih krila u potencijalnom jezgru [6]
Figure 8.84: Slika TSI sistema za kalibraciju hot film sondi preko potencijalnog jezgra
Figure 8.85: Rezultati LDA merenja brzina i turbulencije u potencijalnom jezgru
(Staviti sliku TSI komercijalnog sistema, staviti rezultate LDA merenja u potencijalnom jezgru - vidi Zürich ...)
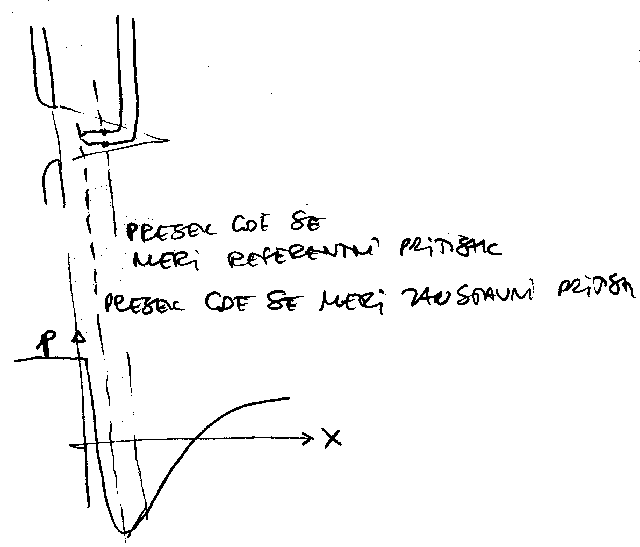
Figure 8.86: Potencijalno jezgro treba pazljivo koristiti za kalibraciju Pito sondi zbog znacajne promene hidrostatskog pritiska u jezgru
Pri kalibraciji sondi koje rade na principu zaustavnog pritiska, problem je veliki gradijent pritiska u jezgru. Uobicajeno je da kod Pitot sondi se zaustavni pritisak meri na samom vrhu sonde, a staticki pritisak nizvodnije. U zoni potencijalnog jezgra je nagla promena pritiska, tako da je neophodno izvrsiti korekciju statickog pritiska. Najbolje bi bilo prvo snimiti raspodelu pritisaka duz potencijalnog jezgra.
Jedino laser i UZV ne remete polje brzina. Bitna je konstrukcija. U knjizi obraditi:
Koliko pretvarac kvari strujnu sliku - proverava se pomo\'cu LDA ili PIV
Pomo\'cu CFD (skra\'cenica od Computational Fluid Dynamics - ili Colorfull Fluid Dynamic) je mogu\'ce proceniti uticaj - potrebna je kalibracija CFD modela
Camnasio, E., E. Orsi. (2008). Experimenting with a new calibration method for current meters. 7th international conference on hydraulic efficiency measurements (IGHEM), Milano (http://www.ighem.org/IGHEM2008/home.html).
Drenthen, J.G. (1987). Accoustic Discharge Measuring Devices. Discharge and Velocity Measurement. Short course by IAHR Section on Hydraulics Instrumentation. Editor: A. Müler.
Durst, F. (1987). Discharge Measuring Methods in Pipes. Discharge and Velocity Measurement. Short course by IAHR Section on Hydraulics Instrumentation. Editor: A. Müler.
Eckelmann, H. (1987). Hot-film and Hot-wire Anemometers. Discharge and Velocity Measurement. Short course by IAHR Section on Hydraulics Instrumentation. Editor: A. Müler.
Endress, U. (1987). Vortex Shedding Flow Meters. Discharge and Velocity Measurement. Short course by IAHR Section on Hydraulics Instrumentation. Editor: A. Müler.
Fingerston, L.M. (1987). An Introduction to Laser Doppler Anemometry. Discharge and Velocity Measurement. Short course by IAHR Section on Hydraulics Instrumentation. Editor: A. Müler.
Mass, H.G., A. Gruen i D. Papantoniou. (1992). Particle Tracking Velocimetry in Three Dimensional Turbulent Flows - Part I: Photogrammetric Determination of Particle Coordinates. Flow Visualization and Flow Structures. Short course by IAHR program of continuing education. Editor: A. Müler.
Maksimovi\'c, C., J. Despotovi\'c, P. Trisi\'c, M. Simi\'c. (1986). Accuracy and reliability of rainfall and runoff measurements - Examples. Urban Drainage Modelling - Supplements. Editori: C. Maksimovi\'c and M. Radojkovi\'c. Dubrovnik.
Malik, N.A., T. Dracos, D. Papantoniou i H.G. Maas. (1992). Particle Tracking Velocimetry in Three Dimensional Turbulent Flows - Part II: Particle Tracking and Lagrangian Trajectories. Flow Visualization and Flow Structures. Short course by IAHR program of continuing education. Editor: A. Müler.
Merzkirch, W. (1987). Methods of Flow Visualization. Discharge and Velocity Measurement. Short course by IAHR Section on Hydraulics Instrumentation. Editor: A. Müler.
Merzkirch, W. (1992). Methods of Flow Visualization. Flow Visualization and Flow Structures. Short course by IAHR program of continuing education. Editor: A. Müler.
Mettlen, D. (1987). Mass Flow Measurement. Discharge and Velocity Measurement. Short course by IAHR Section on Hydraulics Instrumentation. Editor: A. Müler.
Müller, A. i H.G. Maas. (1992). Methods of Flow Visualization. Flow Visualization and Flow Structures. Short course by IAHR program of continuing education. Editor: A. Müler.
Prodanovi\'c, D., A. Spoljari\'c, M. Iveti\'c i C. Maksimovi\'c. (1985). Dynamic characteristics of a pressure measuring system. Symposium on Measuring Techniques in Hydraulic Research. Delft.
Prodanovi\'c, D. (1992). Eksperimentalno izucavanje uticaja dva tipa regulacionih zatvaraca na fluidnu struju. Magistarski rad. Gradjevinski fakultet Univerziteta u Beogradu.
Patel, V.C. (1987). An Introduction to Measurement of Velocity. Discharge and Velocity Measurement. Short course by IAHR Section on Hydraulics Instrumentation. Editor: A. Müler.
Staubli, T. (1987). Propeller-type Current Meters. Discharge and Velocity Measurement. Short course by IAHR Section on Hydraulics Instrumentation. Editor: A. Müler.
Utami, T. i T. Ueno. (1987). Experimental Study on the Coherent Structure of Turbulent Open-channel Flow Using Visualization and Picture Processing. Journal of Fluid Mechanics. Knjiga 174, strane 399-440.
Vojt, P. (2006). Pove\'canje tacnosti merenja nivoa vode kapacitivnom sondom sa primenom na hidraulickoj analizi vodostana sa prigusivacem. Diplomski rad. Gradjevinski fakultet Univerziteta u Beogradu.
Westerweel, J. (1992). Particle Image Velocimetry. Flow Visualization and Flow Structures. Short course by IAHR program of continuing education. Editor: A. Müler.
White, W.R. (1987). Discharge Measuring Methods in Open Channels. Discharge and Velocity Measurement. Short course by IAHR Section on Hydraulics Instrumentation. Editor: A. Müler.
Footnotes:
1Sva ostala krila imaju kosinusnu zavisnost samo do a < 100 .
File translated from
TEX
by
TTH,
version 3.85. On 26 Apr 2012, 11:11.















 Prikazani 2D ADCP uredjaj moze da daje kontinualno protok rekom, ali se po pravilu daju i detaljniji podaci - kompletan profil brzina: KLIKNI za ChannelMaster ADCP
Prikazani 2D ADCP uredjaj moze da daje kontinualno protok rekom, ali se po pravilu daju i detaljniji podaci - kompletan profil brzina: KLIKNI za ChannelMaster ADCP









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}